正在加载图片...
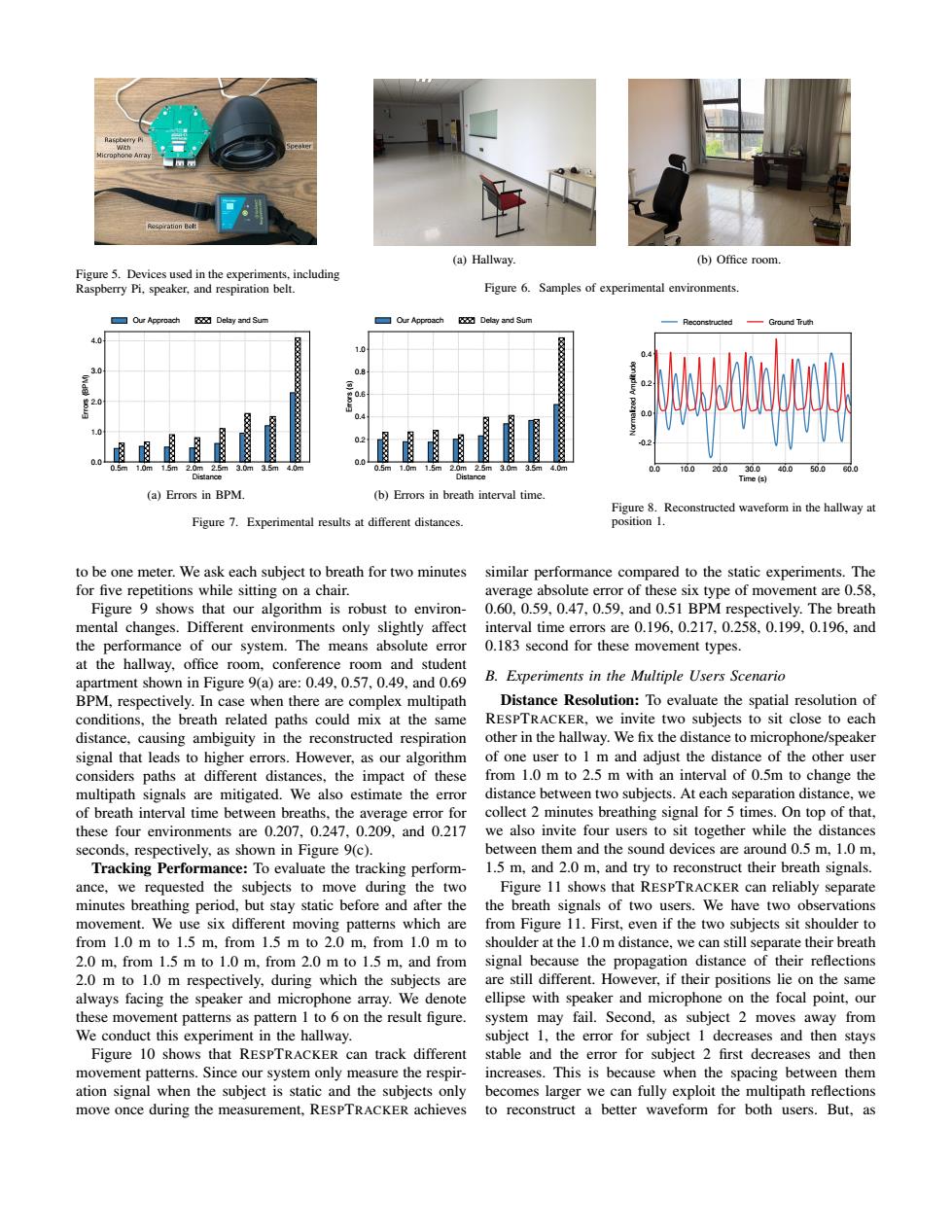
Rospiration Bolt (a)Hallway. (b)Office room. Figure 5.Devices used in the experiments,including Raspberry Pi,speaker,and respiration belt. Figure 6.Samples of experimental environments. ☐Our Approach ☒Delay and Sum ☐Our Approach☒Delay and Sum —Ground Truth 4.01 1.0 0.4 3.0 0.8 g20 0.8 1.0 02 03 0.0 0.5m10m15m2.0m2.5m3.0m3.5m4.0m 0.5m1.0m1.5m20m2.5m3.0m3.5m 4.0m 00 100 20.030040.050.0 60.0 Distance Distance Time(s) (a)Errors in BPM (b)Errors in breath interval time Figure 8.Reconstructed waveform in the hallway at Figure 7.Experimental results at different distances. position 1. to be one meter.We ask each subject to breath for two minutes similar performance compared to the static experiments.The for five repetitions while sitting on a chair. average absolute error of these six type of movement are 0.58, Figure 9 shows that our algorithm is robust to environ- 0.60,0.59,0.47,0.59,and 0.51 BPM respectively.The breath mental changes.Different environments only slightly affect interval time errors are 0.196,0.217,0.258,0.199,0.196,and the performance of our system.The means absolute error 0.183 second for these movement types. at the hallway,office room,conference room and student apartment shown in Figure 9(a)are:0.49,0.57,0.49,and 0.69 B.Experiments in the Multiple Users Scenario BPM,respectively.In case when there are complex multipath Distance Resolution:To evaluate the spatial resolution of conditions,the breath related paths could mix at the same RESPTRACKER,we invite two subjects to sit close to each distance,causing ambiguity in the reconstructed respiration other in the hallway.We fix the distance to microphone/speaker signal that leads to higher errors.However,as our algorithm of one user to I m and adjust the distance of the other user considers paths at different distances,the impact of these from 1.0 m to 2.5 m with an interval of 0.5m to change the multipath signals are mitigated.We also estimate the error distance between two subjects.At each separation distance,we of breath interval time between breaths,the average error for collect 2 minutes breathing signal for 5 times.On top of that, these four environments are 0.207,0.247,0.209,and 0.217 we also invite four users to sit together while the distances seconds,respectively,as shown in Figure 9(c). between them and the sound devices are around 0.5 m.1.0 m. Tracking Performance:To evaluate the tracking perform- 1.5 m,and 2.0 m,and try to reconstruct their breath signals. ance,we requested the subjects to move during the two Figure 11 shows that RESPTRACKER can reliably separate minutes breathing period,but stay static before and after the the breath signals of two users.We have two observations movement.We use six different moving patterns which are from Figure 11.First,even if the two subjects sit shoulder to from 1.0 m to 1.5 m,from 1.5 m to 2.0 m,from 1.0 m to shoulder at the 1.0 m distance,we can still separate their breath 2.0 m,from 1.5 m to 1.0 m,from 2.0 m to 1.5 m,and from signal because the propagation distance of their reflections 2.0 m to 1.0 m respectively,during which the subjects are are still different.However,if their positions lie on the same always facing the speaker and microphone array.We denote ellipse with speaker and microphone on the focal point,our these movement patterns as pattern 1 to 6 on the result figure.system may fail.Second,as subject 2 moves away from We conduct this experiment in the hallway. subject 1,the error for subject 1 decreases and then stays Figure 10 shows that RESPTRACKER can track different stable and the error for subject 2 first decreases and then movement patterns.Since our system only measure the respir-increases.This is because when the spacing between them ation signal when the subject is static and the subjects only becomes larger we can fully exploit the multipath reflections move once during the measurement,RESPTRACKER achieves to reconstruct a better waveform for both users.But,asFigure 5. Devices used in the experiments, including Raspberry Pi, speaker, and respiration belt. (a) Hallway. (b) Office room. Figure 6. Samples of experimental environments. 0.5m 1.0m 1.5m 2.0m 2.5m 3.0m 3.5m 4.0m Distance 0.0 1.0 2.0 3.0 4.0 Errors (BPM) Our Approach Delay and Sum (a) Errors in BPM. 0.5m 1.0m 1.5m 2.0m 2.5m 3.0m 3.5m 4.0m Distance 0.0 0.2 0.4 0.6 0.8 1.0 Errors (s) Our Approach Delay and Sum (b) Errors in breath interval time. Figure 7. Experimental results at different distances. 0.0 10.0 20.0 30.0 40.0 50.0 60.0 Time (s) -0.2 0.0 0.2 0.4 Normalized Amplitude Reconstructed Ground Truth Figure 8. Reconstructed waveform in the hallway at position 1. to be one meter. We ask each subject to breath for two minutes for five repetitions while sitting on a chair. Figure 9 shows that our algorithm is robust to environmental changes. Different environments only slightly affect the performance of our system. The means absolute error at the hallway, office room, conference room and student apartment shown in Figure 9(a) are: 0.49, 0.57, 0.49, and 0.69 BPM, respectively. In case when there are complex multipath conditions, the breath related paths could mix at the same distance, causing ambiguity in the reconstructed respiration signal that leads to higher errors. However, as our algorithm considers paths at different distances, the impact of these multipath signals are mitigated. We also estimate the error of breath interval time between breaths, the average error for these four environments are 0.207, 0.247, 0.209, and 0.217 seconds, respectively, as shown in Figure 9(c). Tracking Performance: To evaluate the tracking performance, we requested the subjects to move during the two minutes breathing period, but stay static before and after the movement. We use six different moving patterns which are from 1.0 m to 1.5 m, from 1.5 m to 2.0 m, from 1.0 m to 2.0 m, from 1.5 m to 1.0 m, from 2.0 m to 1.5 m, and from 2.0 m to 1.0 m respectively, during which the subjects are always facing the speaker and microphone array. We denote these movement patterns as pattern 1 to 6 on the result figure. We conduct this experiment in the hallway. Figure 10 shows that RESPTRACKER can track different movement patterns. Since our system only measure the respiration signal when the subject is static and the subjects only move once during the measurement, RESPTRACKER achieves similar performance compared to the static experiments. The average absolute error of these six type of movement are 0.58, 0.60, 0.59, 0.47, 0.59, and 0.51 BPM respectively. The breath interval time errors are 0.196, 0.217, 0.258, 0.199, 0.196, and 0.183 second for these movement types. B. Experiments in the Multiple Users Scenario Distance Resolution: To evaluate the spatial resolution of RESPTRACKER, we invite two subjects to sit close to each other in the hallway. We fix the distance to microphone/speaker of one user to 1 m and adjust the distance of the other user from 1.0 m to 2.5 m with an interval of 0.5m to change the distance between two subjects. At each separation distance, we collect 2 minutes breathing signal for 5 times. On top of that, we also invite four users to sit together while the distances between them and the sound devices are around 0.5 m, 1.0 m, 1.5 m, and 2.0 m, and try to reconstruct their breath signals. Figure 11 shows that RESPTRACKER can reliably separate the breath signals of two users. We have two observations from Figure 11. First, even if the two subjects sit shoulder to shoulder at the 1.0 m distance, we can still separate their breath signal because the propagation distance of their reflections are still different. However, if their positions lie on the same ellipse with speaker and microphone on the focal point, our system may fail. Second, as subject 2 moves away from subject 1, the error for subject 1 decreases and then stays stable and the error for subject 2 first decreases and then increases. This is because when the spacing between them becomes larger we can fully exploit the multipath reflections to reconstruct a better waveform for both users. But, as