正在加载图片...
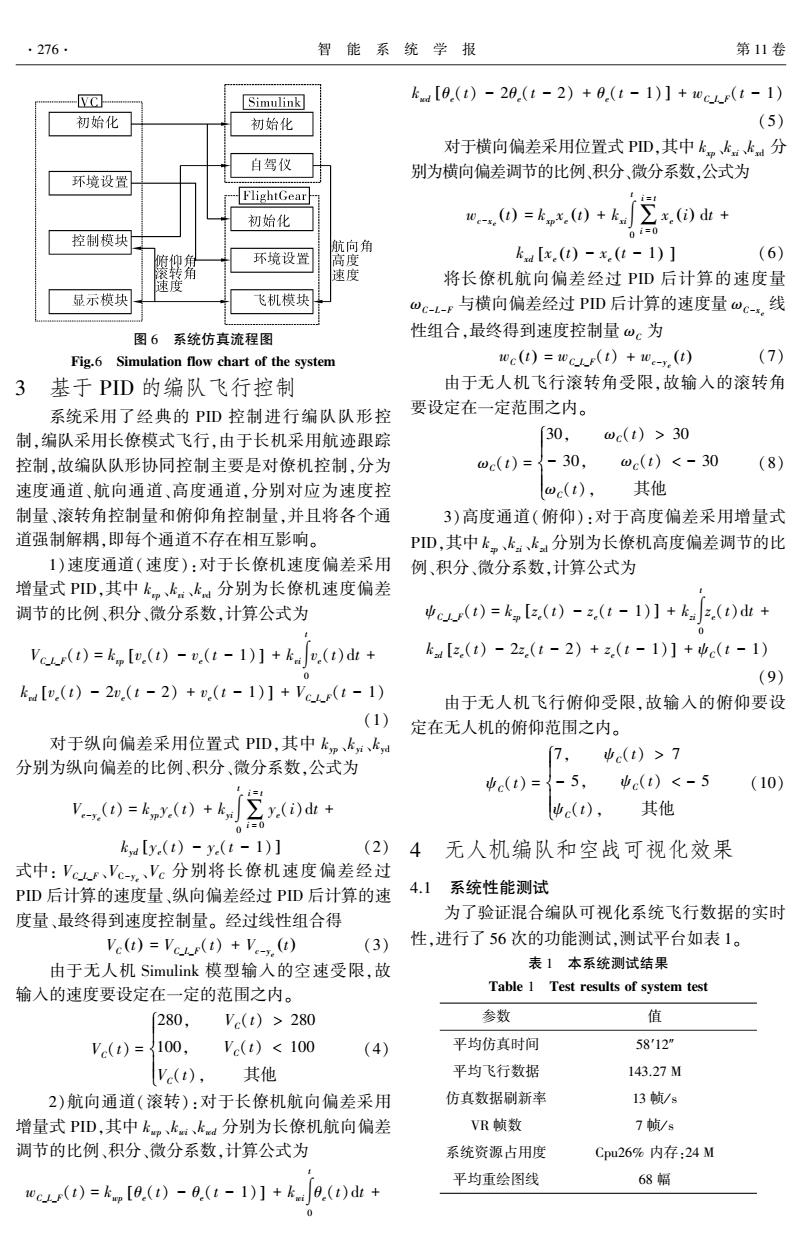
·276· 智能系统学报 第11卷 WC网 Simulink ka[0.(t)-28.(t-2)+0.(t-1)]+0cr(t-1) 初始化 初始化 (5) 对于横向偏差采用位置式PD,其中kpk.ka分 自驾仪 别为横向偏差调节的比例、积分、微分系数,公式为 环境设置 FlightGear 初始化 0-.()=kpx())+k∑x.()d业+ 控制模块 0i=0 航向角 府仰 环境设置 高度 kd[x.(t)-x.(t-1)] (6) 角 速度 速度 将长僚机航向偏差经过PD后计算的速度量 显示模块 飞机模块 ωc--r与横向偏差经过PID后计算的速度量wc-.线 图6系统仿真流程图 性组合,最终得到速度控制量ωc为 Fig.6 Simulation flow chart of the system c()=0cr(t)+0e-.() (7) 3基于PD的编队飞行控制 由于无人机飞行滚转角受限,故输入的滚转角 系统采用了经典的PD控制进行编队队形控 要设定在一定范围之内。 制,编队采用长僚模式飞行,由于长机采用航迹跟踪 [30, wc(t)>30 控制,故编队队形协同控制主要是对僚机控制,分为 wc(t)= -30. ωc(t)<-30 (8) 速度通道、航向通道、高度通道,分别对应为速度控 wc(t), 其他 制量、滚转角控制量和俯仰角控制量,并且将各个通 3)高度通道(俯仰):对于高度偏差采用增量式 道强制解耦,即每个通道不存在相互影响。 PID,其中k,k:ka分别为长僚机高度偏差调节的比 1)速度通道(速度):对于长僚机速度偏差采用 例、积分、微分系数,计算公式为 增量式PID,其中kmk:k.分别为长僚机速度偏差 调节的比例、积分、微分系数,计算公式为 中c(t)=kp【z(t)-z.(t-1)门+ka](t)dh+ Vohr(t)=k [v.(t)-v(t-1)]+kv(t)dt+ ka[z.(t)-2z.(t-2)+z.(t-1)]+ψc(t-1) (9) kd[u.()-2.(t-2)+.(t-1)]+Vcr(t-1) 由于无人机飞行俯仰受限,故输入的俯仰要设 (1) 定在无人机的俯仰范围之内。 对于纵向偏差采用位置式PID,其中kpkk 7, ψc(t)>7 分别为纵向偏差的比例、积分、微分系数,公式为 ψc(t)= -5, ψc(t)<-5 0=0+6j发(0+ (10) ψc(t), 其他 0i=0 kd[y.(t)-y.(t-1)] (2)4 无人机编队和空战可视化效果 式中:Vc、Vc-.Vc分别将长僚机速度偏差经过 PID后计算的速度量、纵向偏差经过PD后计算的速 4.1 系统性能测试 度量、最终得到速度控制量。经过线性组合得 为了验证混合编队可视化系统飞行数据的实时 Ve(t)=Vee(t)+V.(t) (3) 性,进行了56次的功能测试,测试平台如表1。 由于无人机Simulink模型输入的空速受限,故 表1本系统测试结果 输人入的速度要设定在一定的范围之内。 Table 1 Test results of system test 280, V(t)>280 参数 值 Vc(t)=100, Ve(t)<100 (4) 平均仿真时间 58'12" Ve(t), 其他 平均飞行数据 143.27M 2)航向通道(滚转):对于长僚机航向偏差采用 仿真数据刷新率 13帧/s 增量式PID,其中kpka、kd分别为长僚机航向偏差 VR帧数 7帧/s 调节的比例、积分、微分系数,计算公式为 系统资源占用度 Cpu26%内存:24M 平均重绘图线 68幅 0cr(t)=kp[0.(t)-0.(t-1)]+ka9.(t)d+ 0图 6 系统仿真流程图 Fig.6 Simulation flow chart of the system 3 基于 PID 的编队飞行控制 系统采用了经典的 PID 控制进行编队队形控 制,编队采用长僚模式飞行,由于长机采用航迹跟踪 控制,故编队队形协同控制主要是对僚机控制,分为 速度通道、航向通道、高度通道,分别对应为速度控 制量、滚转角控制量和俯仰角控制量,并且将各个通 道强制解耦,即每个通道不存在相互影响。 1)速度通道(速度):对于长僚机速度偏差采用 增量式 PID,其中 kvp、kvi、kvd 分别为长僚机速度偏差 调节的比例、积分、微分系数,计算公式为 VC_L_F(t) = kvp ve(t) - v [ e(t - 1) ] + kvi ∫ t 0 ve(t)dt + kvd ve(t) - 2ve(t - 2) + v [ e(t - 1) ] + VC_L_F(t - 1) (1) 对于纵向偏差采用位置式 PID,其中 kyp、kyi、kyd 分别为纵向偏差的比例、积分、微分系数,公式为 Ve-ye (t) = kyp ye(t) + kyi ∫ t 0 ∑ i = t i = 0 ye(i)dt + kyd ye(t) - y [ e(t - 1) ] (2) 式中: VC_L_F 、VC-ye 、VC 分别将长僚机速度偏差经过 PID 后计算的速度量、纵向偏差经过 PID 后计算的速 度量、最终得到速度控制量。 经过线性组合得 VC (t) = VC_L_F(t) + Vc-ye (t) (3) 由于无人机 Simulink 模型输入的空速受限,故 输入的速度要设定在一定的范围之内。 VC(t) = 280, VC(t) > 280 100, VC(t) < 100 VC(t), 其他 ì î í ï ï ï ï (4) 2)航向通道(滚转):对于长僚机航向偏差采用 增量式 PID,其中 kwp、kwi、kwd 分别为长僚机航向偏差 调节的比例、积分、微分系数,计算公式为 wC_L_F(t) = kwp θe(t) - θ [ e(t - 1) ] + kwi ∫ t 0 θe(t)dt + kwd θe(t) - 2θe(t - 2) + θ [ e(t - 1) ] + wC_L_F(t - 1) (5) 对于横向偏差采用位置式 PID,其中 kxp、kxi、kxd 分 别为横向偏差调节的比例、积分、微分系数,公式为 wc-xe (t) = kxp xe (t) + kxi ∫ t 0 ∑ i = t i = 0 xe (i) dt + kxd xe (t) - xe [ (t - 1) ] (6) 将长僚机航向偏差经过 PID 后计算的速度量 ωC-L-F 与横向偏差经过 PID 后计算的速度量 ωC-xe 线 性组合,最终得到速度控制量 ωC 为 wC (t) = wC_L_F(t) + wc-ye (t) (7) 由于无人机飞行滚转角受限,故输入的滚转角 要设定在一定范围之内。 ωC(t) = 30, ωC(t) > 30 - 30, ωC(t) < - 30 ωC(t), 其他 ì î í ï ï ï ï (8) 3)高度通道(俯仰):对于高度偏差采用增量式 PID,其中 kzp、kzi、kzd 分别为长僚机高度偏差调节的比 例、积分、微分系数,计算公式为 ψC_L_F(t) = kzp ze(t) - z [ e(t - 1) ] + kzi ∫ t 0 ze(t)dt + kzd ze(t) - 2ze(t - 2) + z [ e(t - 1) ] + ψC(t - 1) (9) 由于无人机飞行俯仰受限,故输入的俯仰要设 定在无人机的俯仰范围之内。 ψC(t) = 7, ψC(t) > 7 - 5, ψC(t) < - 5 ψC(t), 其他 ì î í ï ï ï ï (10) 4 无人机编队和空战可视化效果 4.1 系统性能测试 为了验证混合编队可视化系统飞行数据的实时 性,进行了 56 次的功能测试,测试平台如表 1。 表 1 本系统测试结果 Table 1 Test results of system test 参数 值 平均仿真时间 58′12″ 平均飞行数据 143.27 M 仿真数据刷新率 13 帧/ s VR 帧数 7 帧/ s 系统资源占用度 Cpu26% 内存:24 M 平均重绘图线 68 幅 ·276· 智 能 系 统 学 报 第 11 卷