正在加载图片...
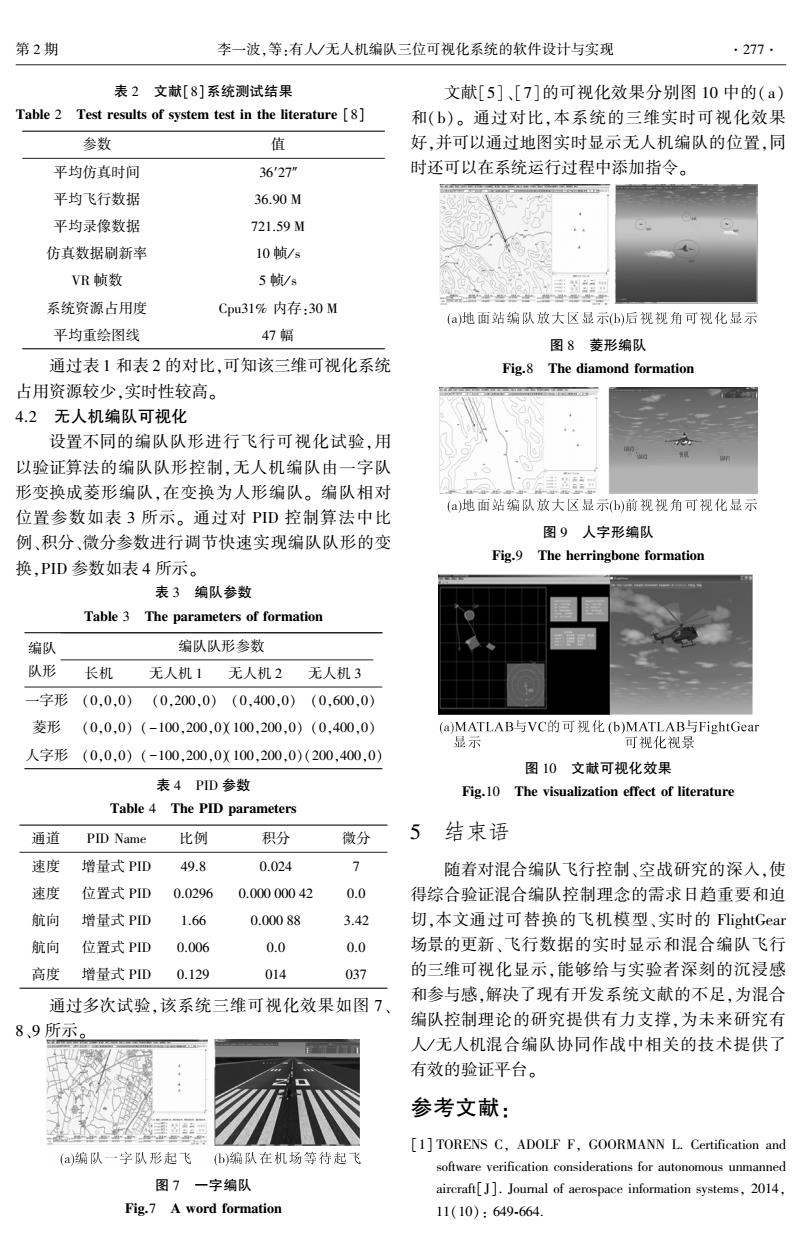
第2期 李一波,等:有人/无人机编队三位可视化系统的软件设计与实现 .277. 表2文献[8]系统测试结果 文献[5]、[7]的可视化效果分别图10中的(a) Table 2 Test results of system test in the literature [8] 和(b)。通过对比,本系统的三维实时可视化效果 参数 值 好,并可以通过地图实时显示无人机编队的位置,同 平均仿真时间 36'27" 时还可以在系统运行过程中添加指令。 平均飞行数据 36.90M 平均录像数据 721.59M 仿真数据刷新率 10帧/s VR帧数 5帧/s 系统资源占用度 Cpu31%内存:30M ()地面站编队放大区显示()后视视角可视化显示 平均重绘图线 47幅 图8菱形编队 通过表1和表2的对比,可知该三维可视化系统 Fig.8 The diamond formation 占用资源较少,实时性较高。 4.2无人机编队可视化 设置不同的编队队形进行飞行可视化试验,用 以验证算法的编队队形控制,无人机编队由一字队 形变换成菱形编队,在变换为人形编队。编队相对 (a)地面站编队放大区显示b)前视视角可视化显示 位置参数如表3所示。通过对PD控制算法中比 例、积分、微分参数进行调节快速实现编队队形的变 图9人字形编队 Fig.9 The herringbone formation 换,PID参数如表4示。 表3编队参数 Table 3 The parameters of formation 编队 编队队形参数 队形 长机 无人机1无人机2无人机3 一字形(0.0,0) (0,200,0)(0,400,0)(0,600,0) 菱形 (0.0.0)(-100.200.0X100.200.0)(0,400.0) (a)MATLAB与VC的可视化(b)MATLAB与FightGear 显示 可视化视景 人字形(0,0.0)(-100,200,0X100,200,0)(200,400,0) 图10文献可视化效果 表4PID参数 Fig.10 The visualization effect of literature Table 4 The PID parameters 通道 PID Name 比例 积分 微分 5 结束语 速度 增量式PID 49.8 0.024 个 随着对混合编队飞行控制、空战研究的深入,使 速度 位置式PD 0.0296 0.00000042 0.0 得综合验证混合编队控制理念的需求日趋重要和迫 航向 增量式PD 1.66 0.00088 3.42 切,本文通过可替换的飞机模型、实时的FlightGear 航向 位置式PD 0.006 0.0 0.0 场景的更新、飞行数据的实时显示和混合编队飞行 高度 增量式PD 0.129 014 037 的三维可视化显示,能够给与实验者深刻的沉浸感 通过多次试验,该系统三维可视化效果如图7、 和参与感,解决了现有开发系统文献的不足,为混合 编队控制理论的研究提供有力支撑,为未来研究有 8、9所示 人/无人机混合编队协同作战中相关的技术提供了 有效的验证平台。 参考文献: [1]TORENS C,ADOLF F,GOORMANN L.Certification and (a)编队一字队形起飞 b)编队在机场等待起飞 software verification considerations for autonomous unmanned 图7一字编队 aircraft[].Joumal of aerospace information systems,2014, Fig.7 A word formation 11(10):649-664表 2 文献[8]系统测试结果 Table 2 Test results of system test in the literature [8] 参数 值 平均仿真时间 36′27″ 平均飞行数据 36.90 M 平均录像数据 721.59 M 仿真数据刷新率 10 帧/ s VR 帧数 5 帧/ s 系统资源占用度 Cpu31% 内存:30 M 平均重绘图线 47 幅 通过表 1 和表 2 的对比,可知该三维可视化系统 占用资源较少,实时性较高。 4.2 无人机编队可视化 设置不同的编队队形进行飞行可视化试验,用 以验证算法的编队队形控制,无人机编队由一字队 形变换成菱形编队,在变换为人形编队。 编队相对 位置参数如表 3 所示。 通过对 PID 控制算法中比 例、积分、微分参数进行调节快速实现编队队形的变 换,PID 参数如表 4 所示。 表 3 编队参数 Table 3 The parameters of formation 编队 队形 编队队形参数 长机 无人机 1 无人机 2 无人机 3 一字形 (0,0,0) (0,200,0) (0,400,0) (0,600,0) 菱形 (0,0,0) (-100,200,0)(100,200,0) (0,400,0) 人字形 (0,0,0) (-100,200,0)(100,200,0)(200,400,0) 表 4 PID 参数 Table 4 The PID parameters 通道 PID Name 比例 积分 微分 速度 增量式 PID 49.8 0.024 7 速度 位置式 PID 0.0296 0.000 000 42 0.0 航向 增量式 PID 1.66 0.000 88 3.42 航向 位置式 PID 0.006 0.0 0.0 高度 增量式 PID 0.129 014 037 通过多次试验,该系统三维可视化效果如图 7、 8、9 所示。 图 7 一字编队 Fig.7 A word formation 文献[5]、[7]的可视化效果分别图 10 中的( a) 和(b)。 通过对比,本系统的三维实时可视化效果 好,并可以通过地图实时显示无人机编队的位置,同 时还可以在系统运行过程中添加指令。 图 8 菱形编队 Fig.8 The diamond formation 图 9 人字形编队 Fig.9 The herringbone formation 图 10 文献可视化效果 Fig.10 The visualization effect of literature 5 结束语 随着对混合编队飞行控制、空战研究的深入,使 得综合验证混合编队控制理念的需求日趋重要和迫 切,本文通过可替换的飞机模型、实时的 FlightGear 场景的更新、飞行数据的实时显示和混合编队飞行 的三维可视化显示,能够给与实验者深刻的沉浸感 和参与感,解决了现有开发系统文献的不足,为混合 编队控制理论的研究提供有力支撑,为未来研究有 人/ 无人机混合编队协同作战中相关的技术提供了 有效的验证平台。 参考文献: [1] TORENS C, ADOLF F, GOORMANN L. Certification and software verification considerations for autonomous unmanned aircraft[J]. Journal of aerospace information systems, 2014, 11(10): 649⁃664. 第 2 期 李一波,等:有人/ 无人机编队三位可视化系统的软件设计与实现 ·277·