正在加载图片...
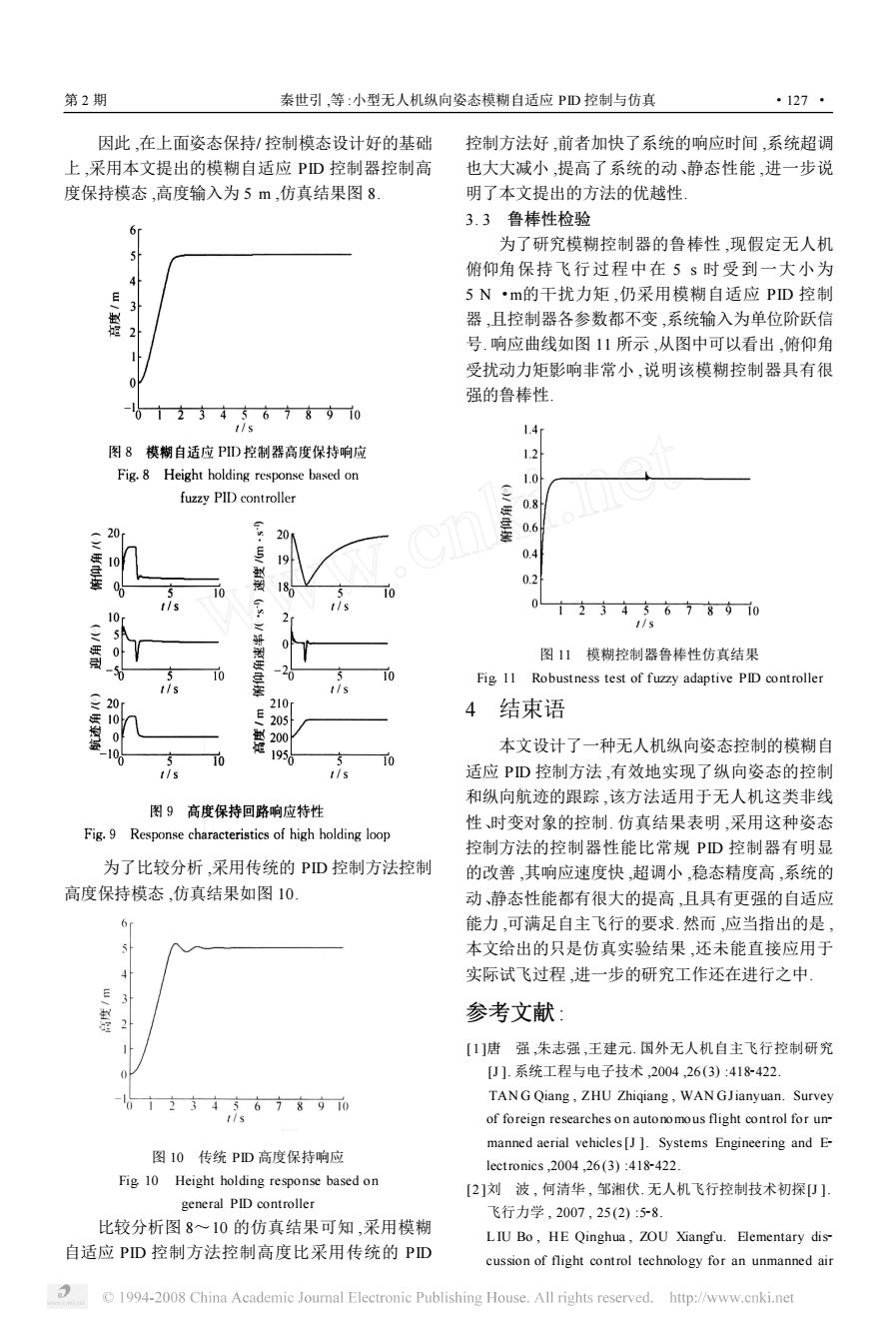
第2期 秦世引,等:小型无人机纵向姿态模糊自适应PD控制与仿真 ·127· 因此,在上面姿态保持/控制模态设计好的基础 控制方法好,前者加快了系统的响应时间,系统超调 上,采用本文提出的模糊自适应PD控制器控制高 也大大减小,提高了系统的动、静态性能,进一步说 度保持模态,高度输入为5m,仿真结果图8. 明了本文提出的方法的优越性 3.3鲁棒性检验 为了研究模糊控制器的鲁棒性,现假定无人机 俯仰角保持飞行过程中在5s时受到一大小为 5N·m的干扰力矩,仍采用模糊自适应PD控制 3 器,且控制器各参数都不变,系统输入为单位阶跃信 号.响应曲线如图11所示,从图中可以看出,俯仰角 受扰动力矩影响非常小,说明该模糊控制器具有很 强的鲁棒性 0十支3456789i0 t/s 1.4 图8模糊自适应PD控制器高度保持响应 Fig.8 Height holding response based on 1.0 fuzzy PID controller 0.8 20 20 0.4 0.2 234567890 10 2 1/s 5 图11模糊控制器鲁棒性仿真结果 10 Fig 11 Robustness test of fuzzy adaptive PID controller 11s 210 4 205 结束语 200 195 本文设计了一种无人机纵向姿态控制的模糊自 10 1/s 适应PD控制方法,有效地实现了纵向姿态的控制 和纵向航迹的跟踪,该方法适用于无人机这类非线 图9高度保持回路响应特性 性、时变对象的控制.仿真结果表明,采用这种姿态 Fig.9 Response characteristics of high holding loop 控制方法的控制器性能比常规PD控制器有明显 为了比较分析,采用传统的PD控制方法控制 的改善,其响应速度快,超调小,稳态精度高,系统的 高度保持模态,仿真结果如图10. 动、静态性能都有很大的提高,且具有更强的自适应 能力,可满足自主飞行的要求然而,应当指出的是 本文给出的只是仿真实验结果,还未能直接应用于 实际试飞过程,进一步的研究工作还在进行之中 E 3 参考文献: [1]唐强,朱志强,王建元.国外无人机自主飞行控制研究 [U].系统工程与电子技术,2004,26(3):418-422 1234567890 TANG Qiang,ZHU Zhiqiang,WANGJianyuan.Survey 1/s of foreign researches on autonomous flight control for un- manned aerial vehicles [J ]Systems Engineering and E- 图10传统PD高度保持响应 lectronics,2004,26(3):418-422 Fig 10 Height holding response based on [2]刘波,何清华,邹湘伏.无人机飞行控制技术初探印] general PID controller 飞行力学,2007,25(2):5-8. 比较分析图8~10的仿真结果可知,采用模糊 LIU Bo,HE Qinghua,ZOU Xiangfu.Elementary dis- 自适应PD控制方法控制高度比采用传统的PD cussion of flight control technology for an unmanned air 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net因此 ,在上面姿态保持/ 控制模态设计好的基础 上 ,采用本文提出的模糊自适应 PID 控制器控制高 度保持模态 ,高度输入为 5 m ,仿真结果图 8. 为了比较分析 ,采用传统的 PID 控制方法控制 高度保持模态 ,仿真结果如图 10. 图 10 传统 PID 高度保持响应 Fig110 Height holding response based on general PID controller 比较分析图 8~10 的仿真结果可知 ,采用模糊 自适应 PID 控制方法控制高度比采用传统的 PID 控制方法好 ,前者加快了系统的响应时间 ,系统超调 也大大减小 ,提高了系统的动、静态性能 ,进一步说 明了本文提出的方法的优越性. 3. 3 鲁棒性检验 为了研究模糊控制器的鲁棒性 ,现假定无人机 俯仰角保持飞行过程中在 5 s 时受到一大小为 5 N ·m的干扰力矩 ,仍采用模糊自适应 PID 控制 器 ,且控制器各参数都不变 ,系统输入为单位阶跃信 号. 响应曲线如图 11 所示 ,从图中可以看出 ,俯仰角 受扰动力矩影响非常小 ,说明该模糊控制器具有很 强的鲁棒性. 图 11 模糊控制器鲁棒性仿真结果 Fig111 Robustness test of fuzzy adaptive PID controller 4 结束语 本文设计了一种无人机纵向姿态控制的模糊自 适应 PID 控制方法 ,有效地实现了纵向姿态的控制 和纵向航迹的跟踪 ,该方法适用于无人机这类非线 性、时变对象的控制. 仿真结果表明 ,采用这种姿态 控制方法的控制器性能比常规 PID 控制器有明显 的改善 ,其响应速度快 ,超调小 ,稳态精度高 ,系统的 动、静态性能都有很大的提高 ,且具有更强的自适应 能力 ,可满足自主飞行的要求. 然而 ,应当指出的是 , 本文给出的只是仿真实验结果 ,还未能直接应用于 实际试飞过程 ,进一步的研究工作还在进行之中. 参考文献 : [1 ]唐 强 ,朱志强 ,王建元. 国外无人机自主飞行控制研究 [J ]. 系统工程与电子技术 ,2004 ,26 (3) :4182422. TAN G Qiang , ZHU Zhiqiang , WAN GJianyuan. Survey of foreign researches on autonomous flight control for un2 manned aerial vehicles[J ]. Systems Engineering and E2 lectronics ,2004 ,26 (3) :4182422. [2 ]刘 波 , 何清华 , 邹湘伏. 无人机飞行控制技术初探[J ]. 飞行力学 , 2007 , 25 (2) :528. L IU Bo , HE Qinghua , ZOU Xiangfu. Elementary dis2 cussion of flight control technology for an unmanned air 第 2 期 秦世引 ,等 :小型无人机纵向姿态模糊自适应 PID 控制与仿真 · 721 ·