正在加载图片...
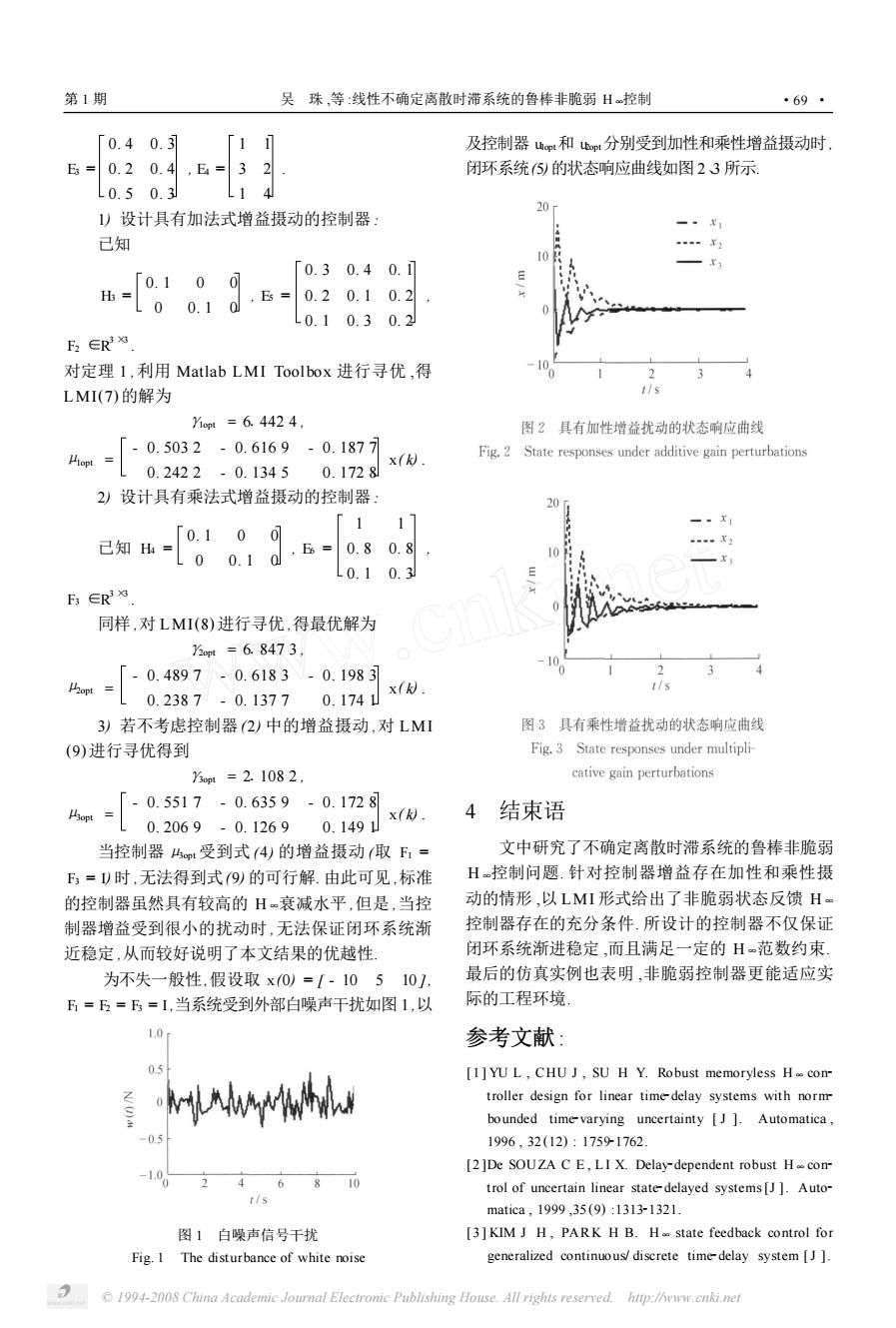
第1期 吴珠,等:线性不确定离散时滞系统的鲁棒非脆弱H控制 ·69· 「0.40.3 1 及控制器p和p分别受到加性和乘性增益摄动时, E3=0.20.4 ,E4=3 2 闭环系统(⑤)的状态响应曲线如图23所示」 L0.50.3到 20 )设计具有加法式增益摄动的控制器: 一。x 己知 07 「0.30.40.1 0.1 0 h=00.10 Es=0.20.10.2 L0.10.30.2 0 E2∈R3为 对定理1,利用Matlab LMI Toolbox进行寻优,得 2 3 LMI(7)的解为 1/s Yiopt 6.442 4. 图2具有加性增益扰动的状态响应曲线 -0.5032-0.6169-0.1877 x() Fig.2 State responses under additive gain perturbations 0.2422-0.1345 0.1728 2)设计具有乘法式增益摄动的控制器: 20 1 7 0 己知= 0.10 00.1a,=0.80.8 10 0.10.3 B∈R3为 P9 同样,对LMI(8)进行寻优,得最优解为 t=6.8473 -10 -0.4897-0.6183-0.1983 0 2 3 x( 1/s 0.2387-0.13770.174 3)若不考虑控制器(2)中的增益摄动,对LMI 图3具有乘性增益扰动的状态响应曲线 (9)进行寻优得到 Fig.3 State responses under multipli- gt=2.1082 cative gain perturbations 「-0.5517-0.6359-0.1728 x(. 4 结束语 0.2069-0.12690.1491 当控制器p受到式4)的增益摄动(取F,= 文中研究了不确定离散时滞系统的鲁棒非脆弱 =)时,无法得到式9)的可行解.由此可见,标准 H一控制问题.针对控制器增益存在加性和乘性摄 的控制器虽然具有较高的H~衰减水平,但是,当控 动的情形,以LMI形式给出了非脆弱状态反馈H一 制器增益受到很小的扰动时,无法保证闭环系统渐 控制器存在的充分条件.所设计的控制器不仅保证 近稳定,从而较好说明了本文结果的优越性, 闭环系统渐进稳定,而且满足一定的H一范数约束 为不失一般性,假设取x0)=[-10510], 最后的仿真实例也表明,非脆弱控制器更能适应实 五=F=F=1,当系统受到外部白噪声千扰如图1,以 际的工程环境 1.0 参考文献: 0.5 [1]YU L,CHU J,SU H Y.Robust memoryless H.con h1wh troller design for linear time-delay systems with norm bounded time-varying uncertainty [J ]Automatica, 0.3 1996,32(12):17591762. [2]De SOUZA C E,LI X.Delay-dependent robust Hcon -1.0 6810 trol of uncertain linear state-delayed systems [J].Auto- 1/s matica,1999,35(9):1313-1321. 图1白噪声信号干扰 [3]KIM J H,PARK H B.H-state feedback control for Fig.I The disturbance of white noise generalized continuous/discrete time-delay system [J]. 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.htp://www.cnki.netE3 = 0. 4 0. 3 0. 2 0. 4 0. 5 0. 3 , E4 = 1 1 3 2 1 4 . 1) 设计具有加法式增益摄动的控制器 : 已知 H3 = 0. 1 0 0 0 0. 1 0 , E5 = 0. 3 0. 4 0. 1 0. 2 0. 1 0. 2 0. 1 0. 3 0. 2 , F2 ∈R 3 ×3 . 对定理 1 ,利用 Matlab LMI Toolbox 进行寻优 ,得 LMI(7) 的解为 γ1opt = 61442 4 , μ1opt = - 0. 503 2 - 0. 616 9 - 0. 187 7 0. 242 2 - 0. 134 5 0. 172 8 x( k) . 2) 设计具有乘法式增益摄动的控制器 : 已知 H4 = 0. 1 0 0 0 0. 1 0 , E6 = 1 1 0. 8 0. 8 0. 1 0. 3 , F3 ∈R 3 ×3 . 同样 ,对 LMI(8) 进行寻优 ,得最优解为 γ2opt = 61847 3 , μ2opt = - 0. 489 7 - 0. 618 3 - 0. 198 3 0. 238 7 - 0. 137 7 0. 174 1 x( k) . 3) 若不考虑控制器 (2) 中的增益摄动 ,对 LMI (9) 进行寻优得到 γ3opt = 21108 2 , μ3opt = - 0. 551 7 - 0. 635 9 - 0. 172 8 0. 206 9 - 0. 126 9 0. 149 1 x( k) . 当控制器μ3opt 受到式 (4) 的增益摄动 (取 F1 = F3 = I) 时 ,无法得到式(9) 的可行解. 由此可见 ,标准 的控制器虽然具有较高的 H ∞衰减水平 ,但是 ,当控 制器增益受到很小的扰动时 ,无法保证闭环系统渐 近稳定 ,从而较好说明了本文结果的优越性. 图 1 白噪声信号干扰 Fig. 1 The disturbance of white noise 为不失一般性,假设取 x(0) = [ - 10 5 10 ], F1 = F2 = F3 = I ,当系统受到外部白噪声干扰如图 1 ,以 及控制器 u1opt和 u2opt分别受到加性和乘性增益摄动时, 闭环系统(5)的状态响应曲线如图 2、3 所示. 4 结束语 文中研究了不确定离散时滞系统的鲁棒非脆弱 H ∞控制问题. 针对控制器增益存在加性和乘性摄 动的情形 ,以 LMI 形式给出了非脆弱状态反馈 H ∞ 控制器存在的充分条件. 所设计的控制器不仅保证 闭环系统渐进稳定 ,而且满足一定的 H ∞范数约束. 最后的仿真实例也表明 ,非脆弱控制器更能适应实 际的工程环境. 参考文献 : [1 ] YU L , CHU J , SU H Y. Robust memoryless H ∞ con2 troller design for linear time2delay systems with norm2 bounded time2varying uncertainty [ J ]. Automatica , 1996 , 32 (12) : 175921762. [ 2 ]De SOUZA C E , L I X. Delay2dependent robust H ∞ con2 trol of uncertain linear state2delayed systems[J ]. Auto2 matica , 1999 ,35 (9) :131321321. [3 ] KIM J H , PAR K H B. H ∞ state feedback control for generalized continuous/ discrete time2delay system [J ]. 第 1 期 吴 珠 ,等 :线性不确定离散时滞系统的鲁棒非脆弱 H ∞控制 · 96 · © 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net