正在加载图片...
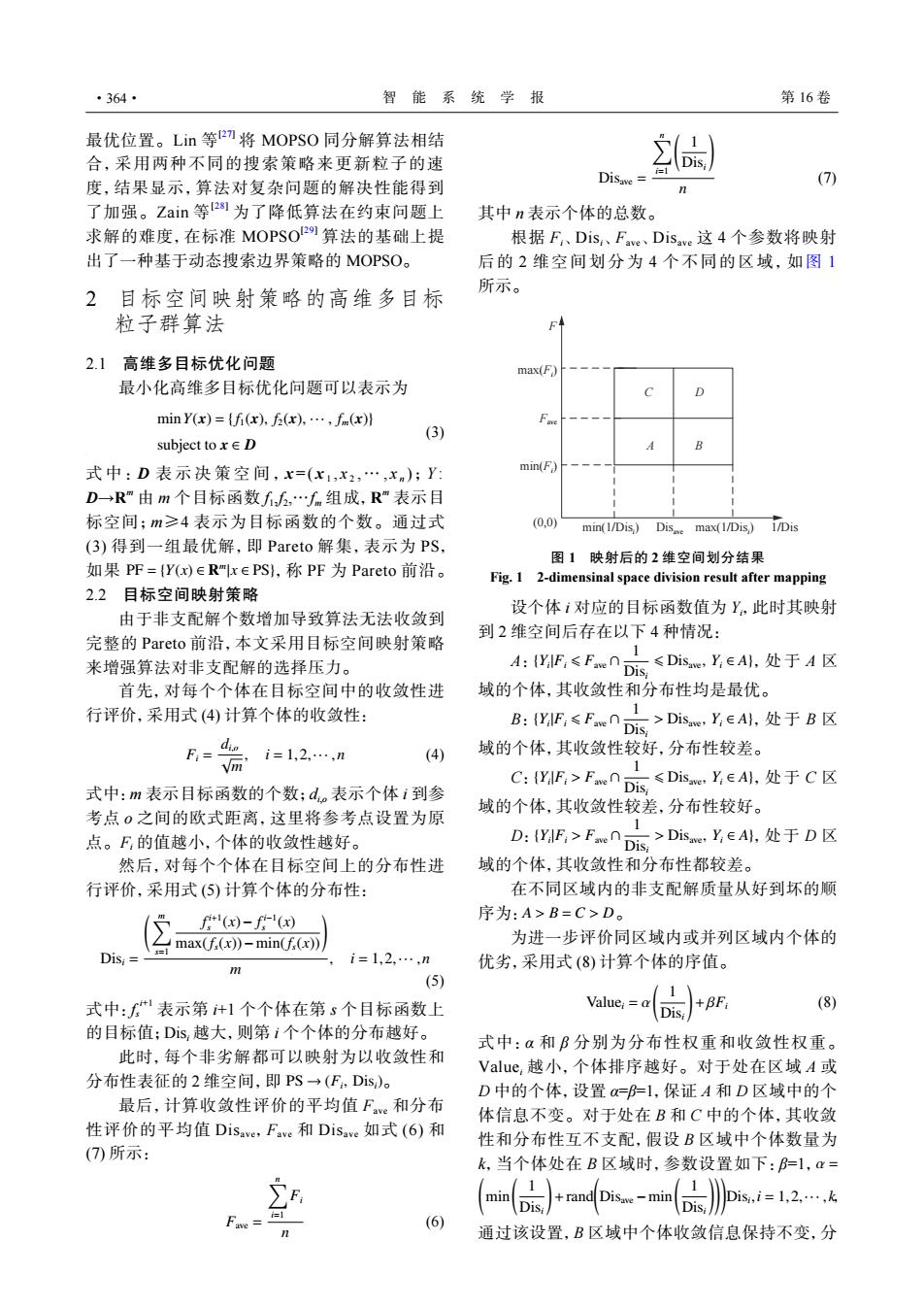
·364· 智能系统学报 第16卷 最优位置。Lin等2将MOPSO同分解算法相结 合,采用两种不同的搜索策略来更新粒子的速 偏 度,结果显示,算法对复杂问题的解决性能得到 Disave= (7 n 了加强。Zain等2]为了降低算法在约束问题上 其中n表示个体的总数。 求解的难度,在标准MOPSO29算法的基础上提 根据F、Dis、Fave、Disave这4个参数将映射 出了一种基于动态搜索边界策略的MOPSO。 后的2维空间划分为4个不同的区域,如图1 2目标空间映射策略的高维多目标 所示。 粒子群算法 F 2.1高维多目标优化问题 max(F) 最小化高维多目标优化问题可以表示为 D minY(x)={fi(x),f(x),…,fm(x)》 F (3) subject tox∈D 7 B 式中:D表示决策空间,x=(x1,x2,…,xn);Y: min(F) D→R"由m个目标函数,…fm组成,R"表示目 标空间;m≥4表示为目标函数的个数。通过式 (0,0) min(1/Dis)Dis max(1/Dis,)1/Dis (3)得到一组最优解,即Pareto解集,表示为PS, 图1映射后的2维空间划分结果 如果PF=(Y(x)∈Rmx∈PSl,称PF为Pareto前沿。 Fig.1 2-dimensinal space division result after mapping 2.2目标空间映射策略 设个体i对应的目标函数值为Y,此时其映射 由于非支配解个数增加导致算法无法收敛到 到2维空间后存在以下4种情况: 完整的Pareto前沿,本文采用目标空间映射策略 来增强算法对非支配解的选择压力。 4:(IEE Dis. ≤DiSe,Y:∈A,处于A区 首先,对每个个体在目标空间中的收敛性进 域的个体,其收敛性和分布性均是最优。 行评价,采用式(4)计算个体的收敛性: B:WIF<FnD点≥Dis.Y,eA.处于B区 fi=diu ,i=1,2,…,n (4) 域的个体,其收敛性较好,分布性较差。 1 式中:m表示目标函数的个数;d,。表示个体i到参 C:YF,>FDis,≤Die,YeA,处于C区 考点0之间的欧式距离,这里将参考点设置为原 域的个体,其收敛性较差,分布性较好。 1 点。F,的值越小,个体的收敛性越好。 D:(YAF>F Dis >Dise,Y,∈A,处于D区 然后,对每个个体在目标空间上的分布性进 域的个体,其收敛性和分布性都较差。 行评价,采用式(⑤)计算个体的分布性: 在不同区域内的非支配解质量从好到坏的顺 f(x)-f-(x) 序为:A>B=C>D。 max(f,(x))-min(f(x)) 为进一步评价同区域内或并列区域内个体的 Disi= i=1,2,…,n 优劣,采用式(8)计算个体的序值。 (5) (1 式中:表示第+1个个体在第s个目标函数上 Valuei=a +8F Disi (8) 的目标值;Dis,越大,则第i个个体的分布越好。 式中:a和B分别为分布性权重和收敛性权重。 此时,每个非劣解都可以映射为以收敛性和 Value,越小,个体排序越好。对于处在区域A或 分布性表征的2维空间,即PS→(F,Dis,)。 D中的个体,设置a==1,保证A和D区域中的个 最后,计算收敛性评价的平均值Fae和分布 体信息不变。对于处在B和C中的个体,其收敛 性评价的平均值DiSave,Fave和Disave如式(6)和 性和分布性互不支配,假设B区域中个体数量为 (7)所示: k,当个体处在B区域时,参数设置如下:=1,α= Dis,i=1,2,…,k Dis: 1 (6) n 通过该设置,B区域中个体收敛信息保持不变,分最优位置。Lin 等 [27] 将 MOPSO 同分解算法相结 合,采用两种不同的搜索策略来更新粒子的速 度,结果显示,算法对复杂问题的解决性能得到 了加强。Zain 等 [28] 为了降低算法在约束问题上 求解的难度,在标准 MOPSO[29] 算法的基础上提 出了一种基于动态搜索边界策略的 MOPSO。 2 目标空间映射策略的高维多目标 粒子群算法 2.1 高维多目标优化问题 最小化高维多目标优化问题可以表示为 minY(x) = {f1(x), f2(x), ··· , fm(x)} subject to x ∈ D (3) PF = {Y(x) ∈ R m |x ∈ PS} 式中: D 表示决策空间, x = ( x 1 , x 2 ,… , x n ) ; Y : D→R m 由 m 个目标函数 f1 ,f2 ,…fm 组成,R m 表示目 标空间;m≥4 表示为目标函数的个数。通过式 (3) 得到一组最优解,即 Pareto 解集,表示为 PS, 如果 ,称 PF 为 Pareto 前沿。 2.2 目标空间映射策略 由于非支配解个数增加导致算法无法收敛到 完整的 Pareto 前沿,本文采用目标空间映射策略 来增强算法对非支配解的选择压力。 首先,对每个个体在目标空间中的收敛性进 行评价,采用式 (4) 计算个体的收敛性: Fi = di,o √ m , i = 1,2,··· ,n (4) 式中:m 表示目标函数的个数;di,o 表示个体 i 到参 考点 o 之间的欧式距离,这里将参考点设置为原 点。Fi 的值越小,个体的收敛性越好。 然后,对每个个体在目标空间上的分布性进 行评价,采用式 (5) 计算个体的分布性: Disi = (∑m s=1 f i+1 s (x)− f i−1 s (x) max(fs(x))−min(fs(x))) m , i = 1,2,··· ,n (5) 式中:fs i+1 表示第 i+1 个个体在第 s 个目标函数上 的目标值;Disi 越大,则第 i 个个体的分布越好。 PS → (Fi , Disi) 此时,每个非劣解都可以映射为以收敛性和 分布性表征的 2 维空间,即 。 最后,计算收敛性评价的平均值 Fave 和分布 性评价的平均值 Disave,Fave 和 Disave 如式 (6) 和 (7) 所示: Fave = ∑n i=1 Fi n (6) Disave = ∑n i=1 ( 1 Disi ) n (7) 其中 n 表示个体的总数。 根据 Fi、Disi、Fave、Disave 这 4 个参数将映射 后的 2 维空间划分为 4 个不同的区域,如图 1 所示。 C A B D (0,0) max(Fi ) Fave min(Fi ) F max(1/Disi Dis ) min(1/Disi ave ) 1/Dis 图 1 映射后的 2 维空间划分结果 Fig. 1 2-dimensinal space division result after mapping 设个体 i 对应的目标函数值为 Yi,此时其映射 到 2 维空间后存在以下 4 种情况: {Yi |Fi ⩽ Fave ∩ 1 Disi ⩽ Disave A: , Yi ∈ A} ,处于 A 区 域的个体,其收敛性和分布性均是最优。 {Yi |Fi ⩽ Fave ∩ 1 Disi > Disave B: , Yi ∈ A} ,处于 B 区 域的个体,其收敛性较好,分布性较差。 {Yi |Fi > Fave ∩ 1 Disi ⩽ Disave C: , Yi ∈ A} ,处于 C 区 域的个体,其收敛性较差,分布性较好。 {Yi |Fi > Fave ∩ 1 Disi > Disave D: , Yi ∈ A} ,处于 D 区 域的个体,其收敛性和分布性都较差。 A > B = C > D 在不同区域内的非支配解质量从好到坏的顺 序为: 。 为进一步评价同区域内或并列区域内个体的 优劣,采用式 (8) 计算个体的序值。 Valuei = α ( 1 Disi ) +βFi (8) α = ( min( 1 Disi ) +rand( Disave −min( 1 Disi )))Disi ,i = 1,2,··· , k 式中:α 和 β 分别为分布性权重和收敛性权重。 Valuei 越小,个体排序越好。对于处在区域 A 或 D 中的个体,设置 α=β=1,保证 A 和 D 区域中的个 体信息不变。对于处在 B 和 C 中的个体,其收敛 性和分布性互不支配,假设 B 区域中个体数量为 k,当个体处在 B 区域时,参数设置如下:β=1, , 通过该设置,B 区域中个体收敛信息保持不变,分 ·364· 智 能 系 统 学 报 第 16 卷