正在加载图片...
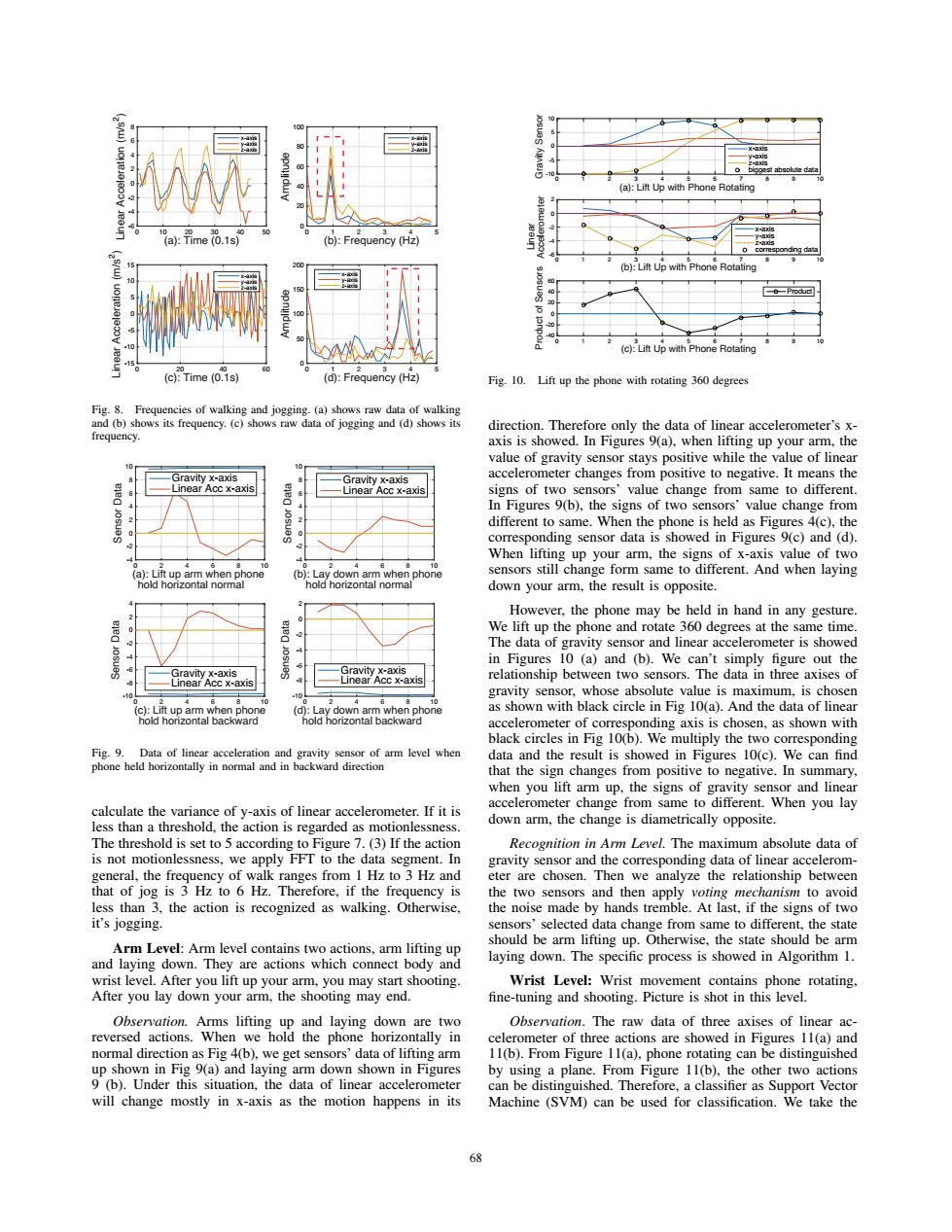
a):Lift Up with Phone Rotating a):Time (0.1s (b):Frequency(Hz) (b):Lift Uo with Phone Rotating 6 (c):Lift Up with Phone Rotating (c):Time (0.1s) (d):Frequency(Hz) Fig.10.Lift up the phone with rotating 360 degrees Fig.8.Frequencies of walking and jogging.(a)shows raw data of walking and (b)shows its frequency.(c)shows raw data of jogging and (d)shows its direction.Therefore only the data of linear accelerometer's x- frequency. axis is showed.In Figures 9(a).when lifting up your arm,the value of gravity sensor stays positive while the value of linear Gravity x-axis Gravity x-axis accelerometer changes from positive to negative.It means the Linear Acc x-axis Acc x-axis signs of two sensors'value change from same to different In Figures 9(b),the signs of two sensors'value change from different to same.When the phone is held as Figures 4(c),the corresponding sensor data is showed in Figures 9(c)and (d). When lifting up your arm,the signs of x-axis value of two (a):Lift up arm when phone (b):Lay down arm when phone sensors still change form same to different.And when laying hold honzontal normal hold honzontal normal down your arm,the result is opposite. However,the phone may be held in hand in any gesture. We lift up the phone and rotate 360 degrees at the same time. The data of gravity sensor and linear accelerometer is showed in Figures 10 (a)and (b).We can't simply figure out the Gravity x-axis x-axis x-axis relationship between two sensors.The data in three axises of Linear Acc x-axis gravity sensor,whose absolute value is maximum,is chosen (c):Lift up arm when phone (d):Lay down arm when pbone as shown with black circle in Fig 10(a).And the data of linear nold hon ard hold hori ard accelerometer of corresponding axis is chosen,as shown with black circles in Fig 10(b).We multiply the two corresponding Fig.9.Data of linear acceleration and gravity sensor of arm level when data and the result is showed in Figures 10(c).We can find phone held horizontally in normal and in backward direction that the sign changes from positive to negative.In summary, when you lift arm up,the signs of gravity sensor and linear accelerometer change from same to different.When you lay calculate the variance of y-axis of linear accelerometer.If it is less than a threshold,the action is regarded as motionlessness. down arm,the change is diametrically opposite. The threshold is set to 5 according to Figure 7.(3)If the action Recognition in Arm Level.The maximum absolute data of is not motionlessness,we apply FFT to the data segment.In gravity sensor and the corresponding data of linear accelerom- general,the frequency of walk ranges from 1 Hz to 3 Hz and eter are chosen.Then we analyze the relationship between that of jog is 3 Hz to 6 Hz.Therefore,if the frequency is the two sensors and then apply voting mechanism to avoid less than 3,the action is recognized as walking.Otherwise, the noise made by hands tremble.At last,if the signs of two it's jogging sensors'selected data change from same to different,the state Arm Level:Arm level contains two actions,arm lifting up should be arm lifting up.Otherwise,the state should be arm and laying down.They are actions which connect body and laying down.The specific process is showed in Algorithm 1. wrist level.After you lift up your arm,you may start shooting. Wrist Level:Wrist movement contains phone rotating. After you lay down your arm,the shooting may end. fine-tuning and shooting.Picture is shot in this level. Observation.Arms lifting up and laying down are two Observation.The raw data of three axises of linear ac- reversed actions.When we hold the phone horizontally in celerometer of three actions are showed in Figures 11(a)and normal direction as Fig 4(b),we get sensors'data of lifting arm 11(b).From Figure 11(a),phone rotating can be distinguished up shown in Fig 9(a)and laying arm down shown in Figures by using a plane.From Figure 11(b),the other two actions 9(b).Under this situation,the data of linear accelerometer can be distinguished.Therefore,a classifier as Support Vector will change mostly in x-axis as the motion happens in its Machine (SVM)can be used for classification.We take the 68(a): Time (0.1s) 0 10 20 30 40 50 Linear Acceleration (m/s2 ) -6 -4 -2 0 2 4 6 8 x-axis y-axis z-axis (b): Frequency (Hz) 012345 Amplitude 0 20 40 60 80 100 x-axis y-axis z-axis (c): Time (0.1s) 0 20 40 60 Linear Acceleration (m/s2 ) -15 -10 -5 0 5 10 15 x-axis y-axis z-axis (d): Frequency (Hz) 012345 Amplitude 0 50 100 150 200 x-axis y-axis z-axis Fig. 8. Frequencies of walking and jogging. (a) shows raw data of walking and (b) shows its frequency. (c) shows raw data of jogging and (d) shows its frequency. (a): Lift up arm when phone hold horizontal normal 0 2 4 6 8 10 Sensor Data -4 -2 0 2 4 6 8 10 Gravity x-axis Linear Acc x-axis (b): Lay down arm when phone hold horizontal normal 0 2 4 6 8 10 Sensor Data -4 -2 0 2 4 6 8 10 Gravity x-axis Linear Acc x-axis (c): Lift up arm when phone hold horizontal backward 0 2 4 6 8 10 Sensor Data -10 -8 -6 -4 -2 0 2 4 Gravity x-axis Linear Acc x-axis (d): Lay down arm when phone hold horizontal backward 0 2 4 6 8 10 Sensor Data -10 -8 -6 -4 -2 0 2 Gravity x-axis Linear Acc x-axis Fig. 9. Data of linear acceleration and gravity sensor of arm level when phone held horizontally in normal and in backward direction calculate the variance of y-axis of linear accelerometer. If it is less than a threshold, the action is regarded as motionlessness. The threshold is set to 5 according to Figure 7. (3) If the action is not motionlessness, we apply FFT to the data segment. In general, the frequency of walk ranges from 1 Hz to 3 Hz and that of jog is 3 Hz to 6 Hz. Therefore, if the frequency is less than 3, the action is recognized as walking. Otherwise, it’s jogging. Arm Level: Arm level contains two actions, arm lifting up and laying down. They are actions which connect body and wrist level. After you lift up your arm, you may start shooting. After you lay down your arm, the shooting may end. Observation. Arms lifting up and laying down are two reversed actions. When we hold the phone horizontally in normal direction as Fig 4(b), we get sensors’ data of lifting arm up shown in Fig 9(a) and laying arm down shown in Figures 9 (b). Under this situation, the data of linear accelerometer will change mostly in x-axis as the motion happens in its (a): Lift Up with Phone Rotating Gravity Sensor 0 1 2 3 4 5 6 7 8 9 10 -10 -5 0 5 10 x-axis y-axis z-axis biggest absolute data (b): Lift Up with Phone Rotating 0 1 2 3 4 5 6 7 8 9 10 Linear Accelerometer -6 -4 -2 0 2 x-axis y-axis z-axis corresponding data (c): Lift Up with Phone Rotating 0 1 2 3 4 5 6 7 8 9 10 Product of Sensors -40 -20 0 20 40 60 Product Fig. 10. Lift up the phone with rotating 360 degrees direction. Therefore only the data of linear accelerometer’s xaxis is showed. In Figures 9(a), when lifting up your arm, the value of gravity sensor stays positive while the value of linear accelerometer changes from positive to negative. It means the signs of two sensors’ value change from same to different. In Figures 9(b), the signs of two sensors’ value change from different to same. When the phone is held as Figures 4(c), the corresponding sensor data is showed in Figures 9(c) and (d). When lifting up your arm, the signs of x-axis value of two sensors still change form same to different. And when laying down your arm, the result is opposite. However, the phone may be held in hand in any gesture. We lift up the phone and rotate 360 degrees at the same time. The data of gravity sensor and linear accelerometer is showed in Figures 10 (a) and (b). We can’t simply figure out the relationship between two sensors. The data in three axises of gravity sensor, whose absolute value is maximum, is chosen as shown with black circle in Fig 10(a). And the data of linear accelerometer of corresponding axis is chosen, as shown with black circles in Fig 10(b). We multiply the two corresponding data and the result is showed in Figures 10(c). We can find that the sign changes from positive to negative. In summary, when you lift arm up, the signs of gravity sensor and linear accelerometer change from same to different. When you lay down arm, the change is diametrically opposite. Recognition in Arm Level. The maximum absolute data of gravity sensor and the corresponding data of linear accelerometer are chosen. Then we analyze the relationship between the two sensors and then apply voting mechanism to avoid the noise made by hands tremble. At last, if the signs of two sensors’ selected data change from same to different, the state should be arm lifting up. Otherwise, the state should be arm laying down. The specific process is showed in Algorithm 1. Wrist Level: Wrist movement contains phone rotating, fine-tuning and shooting. Picture is shot in this level. Observation. The raw data of three axises of linear accelerometer of three actions are showed in Figures 11(a) and 11(b). From Figure 11(a), phone rotating can be distinguished by using a plane. From Figure 11(b), the other two actions can be distinguished. Therefore, a classifier as Support Vector Machine (SVM) can be used for classification. We take the 68