正在加载图片...
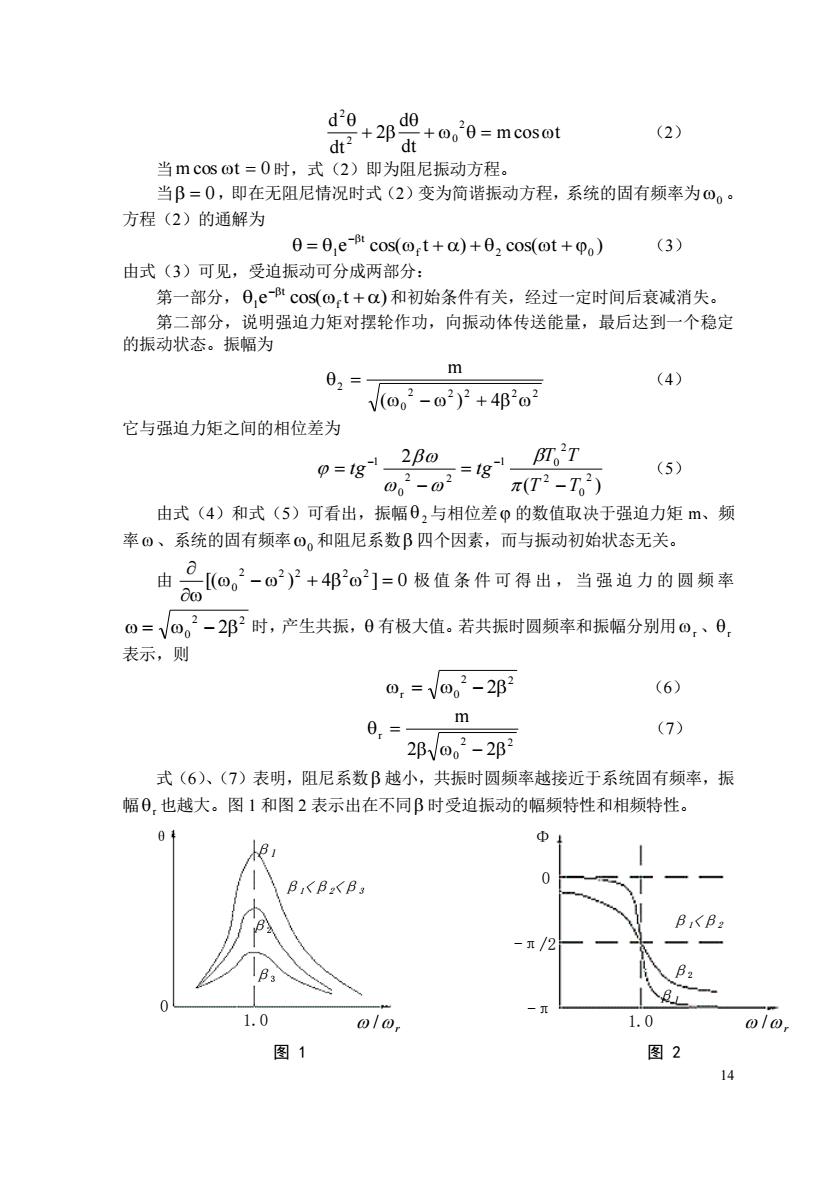
(2) dt 当m cos ot=0时,式(2)即为阻尼振动方程。 当B=0,即在无阻尼情况时式(2)变为简谐振动方程,系统的固有频率为O0· 方程(2)的通解为 日=日,ecos(ot+a)+02cos(ot+po) (3) 由式(3)可见,受迫振动可分成两部分: 第一部分,0,ecos(ot+a)和初始条件有关,经过一定时间后衰减消失。 第二部分,说明强迫力矩对摆轮作功,向振动体传送能量,最后达到一个稳定 的振动状态。振幅为 m 02 (4) V@,2-02y2+4B20 它与强迫力矩之间的相位差为 0,2-02*gm7 0=g12B@ (5) π(T2-T。2) 由式(4)和式(5)可看出,振幅0,与相位差p的数值取决于强迫力矩m、频 率0、系统的固有频率⊙。和阻尼系数B四个因素,而与振动初始状态无关。 品a-+邦0-0极监条件可得出,当强边力的圆频车 由 0=√@。2-2邛2时,产生共振,0有极大值。若共振时圆频率和振幅分别用0,、0, 表示,则 0,=V0,2-2p1 (6) m 0.=- (7) 2邓V02-2B 式(6)、(7)表明,阻尼系数β越小,共振时圆频率越接近于系统固有频率,振 幅0,也越大。图1和图2表示出在不同B时受迫振动的幅频特性和相频特性。 Φ BB2B3 8<B 9 1.0 1.0 图1 图2 1414 mcos t dt d 2 dt d 2 2 0 2 + = + (2) 当 mcos t = 0 时,式(2)即为阻尼振动方程。 当 = 0 ,即在无阻尼情况时式(2)变为简谐振动方程,系统的固有频率为 0 。 方程(2)的通解为 e cos( t ) cos( t ) f 2 0 t = 1 + + + − (3) 由式(3)可见,受迫振动可分成两部分: 第一部分, e cos( t ) f t 1 + − 和初始条件有关,经过一定时间后衰减消失。 第二部分,说明强迫力矩对摆轮作功,向振动体传送能量,最后达到一个稳定 的振动状态。振幅为 2 2 2 2 2 0 2 ( ) 4 m − + = (4) 它与强迫力矩之间的相位差为 ( ) 2 2 0 2 2 1 0 2 2 0 1 T T T T tg tg − = − = − − (5) 由式(4)和式(5)可看出,振幅 2 与相位差 的数值取决于强迫力矩 m、频 率 、系统的固有频率 0 和阻尼系数 四个因素,而与振动初始状态无关。 由 [( ) 4 ] 0 2 2 2 2 2 0 − + = 极 值 条 件 可 得 出 , 当 强 迫 力 的 圆 频 率 2 2 = 0 − 2 时,产生共振, 有极大值。若共振时圆频率和振幅分别用 r 、r 表示,则 2 2 r = 0 − 2 (6) 2 2 0 r 2 2 m − = (7) 式(6)、(7)表明,阻尼系数 越小,共振时圆频率越接近于系统固有频率,振 幅 r 也越大。图 1 和图 2 表示出在不同 时受迫振动的幅频特性和相频特性。 图 1 图 2 r / β1 β2 β1<β2 -π -π/2 0 Φ 1.0 β1 β2 β3 β1<β2<β3 r 1.0 / θ 0