正在加载图片...
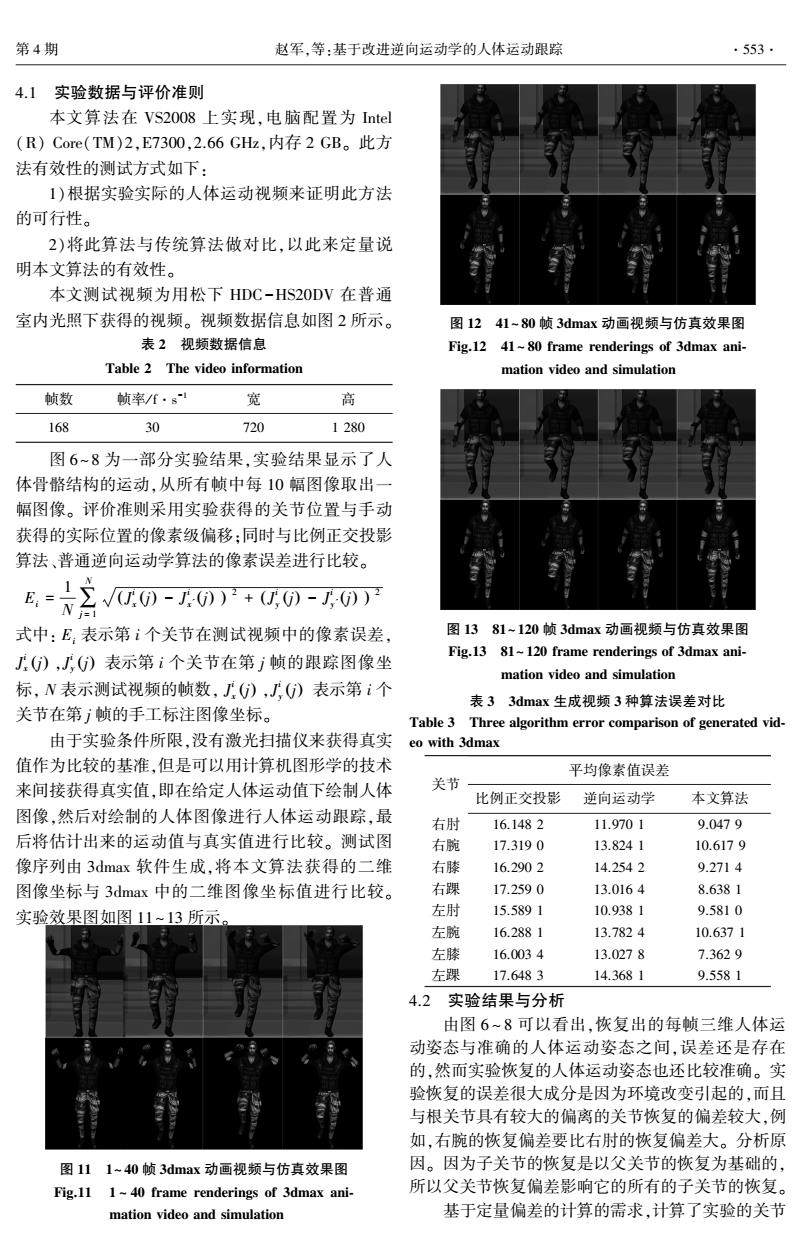
第4期 赵军,等:基于改进逆向运动学的人体运动跟踪 ·553. 4.1实验数据与评价准则 本文算法在VS2008上实现,电脑配置为ntel (R)Coe(TM)2,E7300,2.66GHz,内存2GB。此方 法有效性的测试方式如下: 1)根据实验实际的人体运动视频来证明此方法 的可行性。 2)将此算法与传统算法做对比,以此来定量说 明本文算法的有效性。 本文测试视频为用松下HDC-HS20DV在普通 室内光照下获得的视频。视频数据信息如图2所示。 图1241~80帧3dmax动画视频与仿真效果图 表2视频数据信息 Fig.12 41~80 frame renderings of 3dmax ani- Table 2 The video information mation video and simulation 帧数 帧率/f·8 宽 高 168 30 720 1280 图6~8为一部分实验结果,实验结果显示了人 体骨骼结构的运动,从所有帧中每10幅图像取出一 幅图像。评价准则采用实验获得的关节位置与手动 获得的实际位置的像素级偏移:同时与比例正交投影 算法、普通逆向运动学算法的像素误差进行比较。 =20-0+U0-0 式中:E:表示第i个关节在测试视频中的像素误差, 图1381-120帧3dmax动画视频与仿真效果图 Fig.13 81~120 frame renderings of 3dmax ani- J(),J)表示第i个关节在第j帧的跟踪图像坐 mation video and simulation 标,N表示测试视频的帧数,J(),J)表示第i个 表33dmax生成视频3种算法误差对比 关节在第j帧的手工标注图像坐标。 Table 3 Three algorithm error comparison of generated vid- 由于实验条件所限,没有激光扫描仪来获得真实 eo with 3dmax 值作为比较的基准,但是可以用计算机图形学的技术 平均像素值误差 来间接获得真实值,即在给定人体运动值下绘制人体 关节 比例正交投影 逆向运动学 本文算法 图像,然后对绘制的人体图像进行人体运动跟踪,最 右肘 16.1482 11.9701 9.0479 后将估计出来的运动值与真实值进行比较。测试图 右腕 17.3190 13.8241 10.6179 像序列由3dmax软件生成,将本文算法获得的二维 右膝 16.2902 14.2542 9.2714 图像坐标与3dmax中的二维图像坐标值进行比较。 右踝 17.2590 13.0164 8.6381 实验效果图如图11~13所示 左肘 15.5891 10.9381 9.5810 左腕 16.2881 13.7824 10.6371 左膝 16.0034 13.0278 7.3629 左踝 17.6483 14.3681 9.5581 4.2实验结果与分析 由图6~8可以看出,恢复出的每帧三维人体运 动姿态与准确的人体运动姿态之间,误差还是存在 的,然而实验恢复的人体运动姿态也还比较准确。实 验恢复的误差很大成分是因为环境改变引起的,而且 与根关节具有较大的偏离的关节恢复的偏差较大,例 如,右腕的恢复偏差要比右肘的恢复偏差大。分析原 图111~40帧3dmax动画视频与仿真效果图 因。因为子关节的恢复是以父关节的恢复为基础的, Fig.11 1~40 frame renderings of 3dmax ani- 所以父关节恢复偏差影响它的所有的子关节的恢复。 mation video and simulation 基于定量偏差的计算的需求,计算了实验的关节4.1 实验数据与评价准则 本文算法在 VS2008 上实现,电脑配置为 Intel (R) Core(TM)2,E7300,2.66 GHz,内存 2 GB。 此方 法有效性的测试方式如下: 1)根据实验实际的人体运动视频来证明此方法 的可行性。 2)将此算法与传统算法做对比,以此来定量说 明本文算法的有效性。 本文测试视频为用松下 HDC-HS20DV 在普通 室内光照下获得的视频。 视频数据信息如图 2 所示。 表 2 视频数据信息 Table 2 The video information 帧数 帧率/ f·s -1 宽 高 168 30 720 1 280 图 6~8 为一部分实验结果,实验结果显示了人 体骨骼结构的运动,从所有帧中每 10 幅图像取出一 幅图像。 评价准则采用实验获得的关节位置与手动 获得的实际位置的像素级偏移;同时与比例正交投影 算法、普通逆向运动学算法的像素误差进行比较。 Ei = 1 N∑ N j = 1 J i x (j) - J i x ( '(j) ) 2 + J i y (j) - J i y ( '(j) ) 2 式中: Ei 表示第 i 个关节在测试视频中的像素误差, J i x (j) ,J i y (j) 表示第 i 个关节在第 j 帧的跟踪图像坐 标, N 表示测试视频的帧数, J i x (j) ,J i y (j) 表示第 i 个 关节在第 j 帧的手工标注图像坐标。 由于实验条件所限,没有激光扫描仪来获得真实 值作为比较的基准,但是可以用计算机图形学的技术 来间接获得真实值,即在给定人体运动值下绘制人体 图像,然后对绘制的人体图像进行人体运动跟踪,最 后将估计出来的运动值与真实值进行比较。 测试图 像序列由 3dmax 软件生成,将本文算法获得的二维 图像坐标与 3dmax 中的二维图像坐标值进行比较。 实验效果图如图 11~13 所示。 图 11 1~ 40 帧 3dmax 动画视频与仿真效果图 Fig.11 1 ~ 40 frame renderings of 3dmax ani⁃ mation video and simulation 图 12 41~ 80 帧 3dmax 动画视频与仿真效果图 Fig.12 41 ~ 80 frame renderings of 3dmax ani⁃ mation video and simulation 图 13 81~ 120 帧 3dmax 动画视频与仿真效果图 Fig.13 81~ 120 frame renderings of 3dmax ani⁃ mation video and simulation 表 3 3dmax 生成视频 3 种算法误差对比 Table 3 Three algorithm error comparison of generated vid⁃ eo with 3dmax 关节 平均像素值误差 比例正交投影 逆向运动学 本文算法 右肘 16.148 2 11.970 1 9.047 9 右腕 17.319 0 13.824 1 10.617 9 右膝 16.290 2 14.254 2 9.271 4 右踝 17.259 0 13.016 4 8.638 1 左肘 15.589 1 10.938 1 9.581 0 左腕 16.288 1 13.782 4 10.637 1 左膝 16.003 4 13.027 8 7.362 9 左踝 17.648 3 14.368 1 9.558 1 4.2 实验结果与分析 由图 6 ~ 8 可以看出,恢复出的每帧三维人体运 动姿态与准确的人体运动姿态之间,误差还是存在 的,然而实验恢复的人体运动姿态也还比较准确。 实 验恢复的误差很大成分是因为环境改变引起的,而且 与根关节具有较大的偏离的关节恢复的偏差较大,例 如,右腕的恢复偏差要比右肘的恢复偏差大。 分析原 因。 因为子关节的恢复是以父关节的恢复为基础的, 所以父关节恢复偏差影响它的所有的子关节的恢复。 基于定量偏差的计算的需求,计算了实验的关节 第 4 期 赵军,等:基于改进逆向运动学的人体运动跟踪 ·553·