正在加载图片...
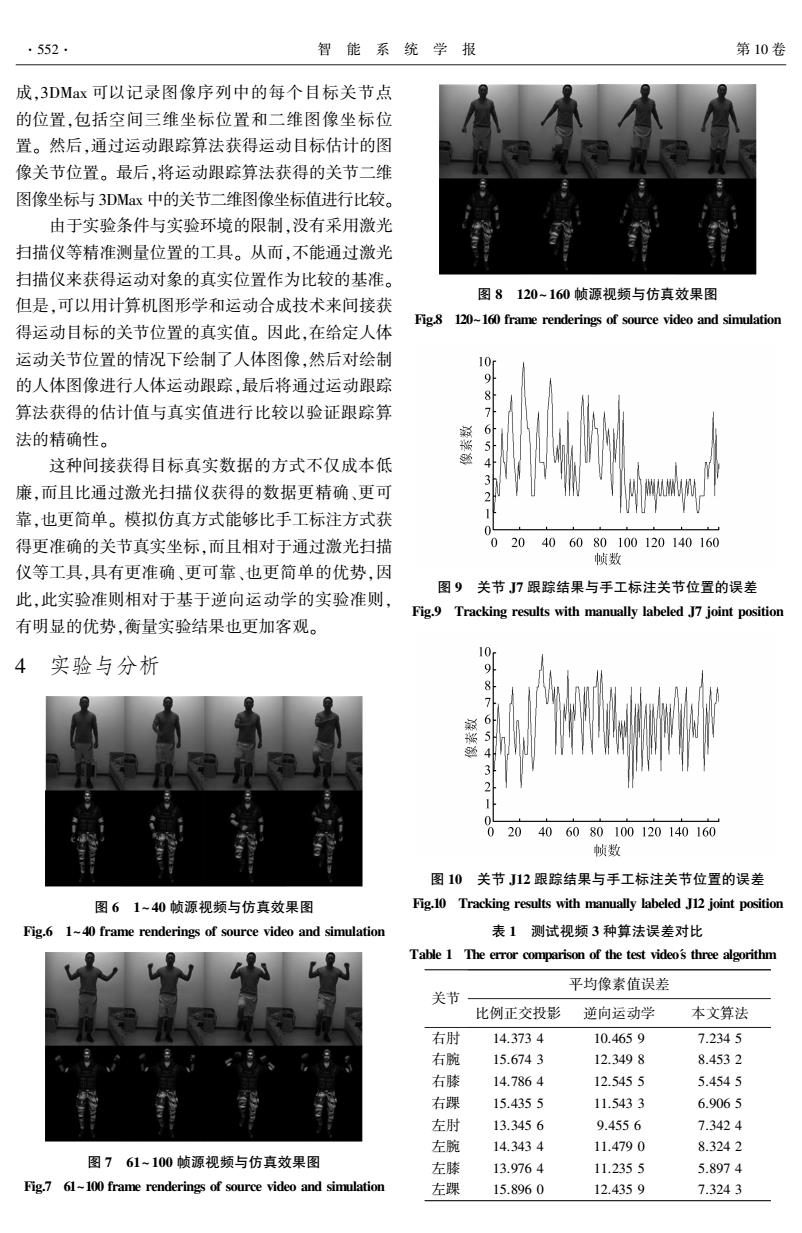
.552. 智能系统学报 第10卷 成,3DMax可以记录图像序列中的每个目标关节点 的位置,包括空间三维坐标位置和二维图像坐标位 置。然后,通过运动跟踪算法获得运动目标估计的图 像关节位置。最后,将运动跟踪算法获得的关节二维 图像坐标与3DMax中的关节二维图像坐标值进行比较。 由于实验条件与实验环境的限制,没有采用激光 扫描仪等精准测量位置的工具。从而,不能通过激光 扫描仪来获得运动对象的真实位置作为比较的基准。 图8120-160帧源视频与仿真效果图 但是,可以用计算机图形学和运动合成技术来间接获 Fig.8 120-160 frame renderings of source video and simulation 得运动目标的关节位置的真实值。因此,在给定人体 运动关节位置的情况下绘制了人体图像,然后对绘制 10m 的人体图像进行人体运动跟踪,最后将通过运动跟踪 算法获得的估计值与真实值进行比较以验证跟踪算 987 法的精确性。 6 这种间接获得目标真实数据的方式不仅成本低 廉,而且比通过激光扫描仪获得的数据更精确、更可 2 靠,也更简单。模拟仿真方式能够比手工标注方式获 得更准确的关节真实坐标,而且相对于通过激光扫描 02040 6080100120140160 帧数 仪等工具,具有更准确、更可靠、也更简单的优势,因 图9关节J7跟踪结果与手工标注关节位置的误差 此,此实验准则相对于基于逆向运动学的实验准则, Fig.9 Tracking results with manually labeled J7 joint position 有明显的优势,衡量实验结果也更加客观。 10 4实验与分析 9 8 6 5 4 0 020406080100120140160 帧数 图10关节J12跟踪结果与手工标注关节位置的误差 图61~40帧源视频与仿真效果图 Fig.10 Tracking results with manually labeled J12 joint position Fig.6 1~40 frame renderings of source video and simulation 表1测试视频3种算法误差对比 Table 1 The error comparison of the test video's three algorithm 平均像素值误差 关节 比例正交投影 逆向运动学 本文算法 右肘 14.3734 10.4659 7.2345 右腕 15.6743 12.3498 8.4532 右膝 14.7864 12.5455 5.4545 右踝 15.4355 11.5433 6.9065 左肘 13.3456 9.4556 7.3424 左腕 14.3434 11.4790 8.3242 图761~100帧源视频与仿真效果图 左膝 13.9764 11.2355 5.8974 Fig.7 61~100 frame renderings of source video and simulation 左踝 15.8960 12.4359 7.3243成,3DMax 可以记录图像序列中的每个目标关节点 的位置,包括空间三维坐标位置和二维图像坐标位 置。 然后,通过运动跟踪算法获得运动目标估计的图 像关节位置。 最后,将运动跟踪算法获得的关节二维 图像坐标与 3DMax 中的关节二维图像坐标值进行比较。 由于实验条件与实验环境的限制,没有采用激光 扫描仪等精准测量位置的工具。 从而,不能通过激光 扫描仪来获得运动对象的真实位置作为比较的基准。 但是,可以用计算机图形学和运动合成技术来间接获 得运动目标的关节位置的真实值。 因此,在给定人体 运动关节位置的情况下绘制了人体图像,然后对绘制 的人体图像进行人体运动跟踪,最后将通过运动跟踪 算法获得的估计值与真实值进行比较以验证跟踪算 法的精确性。 这种间接获得目标真实数据的方式不仅成本低 廉,而且比通过激光扫描仪获得的数据更精确、更可 靠,也更简单。 模拟仿真方式能够比手工标注方式获 得更准确的关节真实坐标,而且相对于通过激光扫描 仪等工具,具有更准确、更可靠、也更简单的优势,因 此,此实验准则相对于基于逆向运动学的实验准则, 有明显的优势,衡量实验结果也更加客观。 4 实验与分析 图 6 1~ 40 帧源视频与仿真效果图 Fig.6 1~40 frame renderings of source video and simulation 图 7 61~ 100 帧源视频与仿真效果图 Fig.7 61~100 frame renderings of source video and simulation 图 8 120~ 160 帧源视频与仿真效果图 Fig.8 120~160 frame renderings of source video and simulation 图 9 关节 J7 跟踪结果与手工标注关节位置的误差 Fig.9 Tracking results with manually labeled J7 joint position 图 10 关节 J12 跟踪结果与手工标注关节位置的误差 Fig.10 Tracking results with manually labeled J12 joint position 表 1 测试视频 3 种算法误差对比 Table 1 The error comparison of the test video's three algorithm 关节 平均像素值误差 比例正交投影 逆向运动学 本文算法 右肘 14.373 4 10.465 9 7.234 5 右腕 15.674 3 12.349 8 8.453 2 右膝 14.786 4 12.545 5 5.454 5 右踝 15.435 5 11.543 3 6.906 5 左肘 13.345 6 9.455 6 7.342 4 左腕 14.343 4 11.479 0 8.324 2 左膝 13.976 4 11.235 5 5.897 4 左踝 15.896 0 12.435 9 7.324 3 ·552· 智 能 系 统 学 报 第 10 卷