正在加载图片...
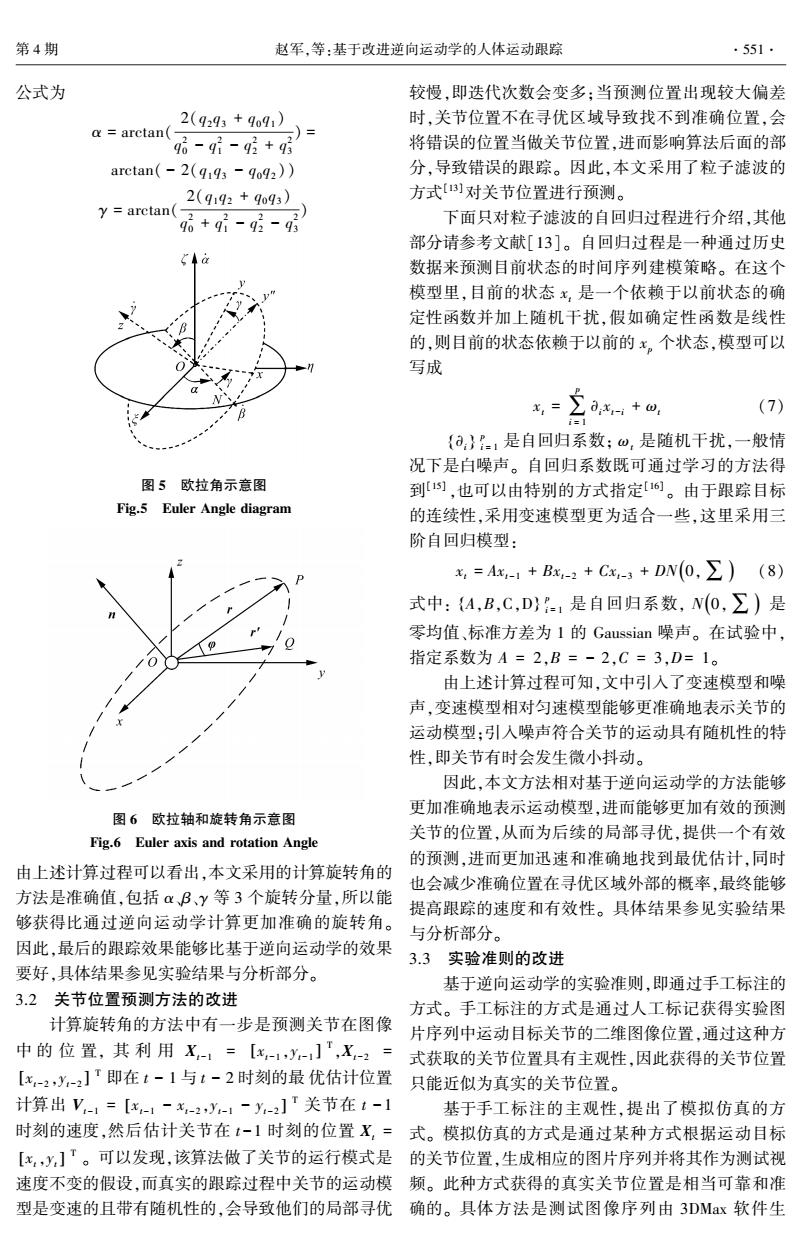
第4期 赵军,等:基于改进逆向运动学的人体运动跟踪 ·551. 公式为 较慢,即迭代次数会变多;当预测位置出现较大偏差 2(q293+9o91) 时,关节位置不在寻优区域导致找不到准确位置,会 a arctan(- 6-9-92+9后 将错误的位置当做关节位置,进而影响算法后面的部 arctan(-2(q193-9o92) 分,导致错误的跟踪。因此,本文采用了粒子滤波的 2(9192+9093) 方式[3]对关节位置进行预测。 y=acan(6+i-i-g 下面只对粒子滤波的自回归过程进行介绍,其他 部分请参考文献[13]。自回归过程是一种通过历史 数据来预测目前状态的时间序列建模策略。在这个 模型里,目前的状态x,是一个依赖于以前状态的确 定性函数并加上随机干扰,假如确定性函数是线性 的,则目前的状态依赖于以前的x。个状态,模型可以 写成 气=龙4+@ (7) i=1 {a:}-1是自回归系数;w,是随机干扰,一般情 况下是白噪声。自回归系数既可通过学习的方法得 图5欧拉角示意图 到,也可以由特别的方式指定6。由于跟踪目标 Fig.5 Euler Angle diagram 的连续性,采用变速模型更为适合一些,这里采用三 阶自回归模型: x=Ax-1+Bx-2+Cx-3+DN(0,∑)(8) 式中:{4,B,C,D}=1是自回归系数,N(O,∑)是 零均值、标准方差为1的Gaussian噪声。在试验中, 指定系数为A=2,B=-2,C=3,D=1。 由上述计算过程可知,文中引入了变速模型和噪 声,变速模型相对匀速模型能够更准确地表示关节的 运动模型:引入噪声符合关节的运动具有随机性的特 性,即关节有时会发生微小抖动。 因此,本文方法相对基于逆向运动学的方法能够 更加准确地表示运动模型,进而能够更加有效的预测 图6欧拉轴和旋转角示意图 关节的位置,从而为后续的局部寻优,提供一个有效 Fig.6 Euler axis and rotation Angle 的预测,进而更加迅速和准确地找到最优估计,同时 由上述计算过程可以看出,本文采用的计算旋转角的 也会减少准确位置在寻优区域外部的概率,最终能够 方法是准确值,包括αB、y等3个旋转分量,所以能 够获得比通过逆向运动学计算更加准确的旋转角。与分析部分。 提高跟踪的速度和有效性。具体结果参见实验结果 因此,最后的跟踪效果能够比基于逆向运动学的效果 3.3实验准则的改进 要好,具体结果参见实验结果与分析部分。 基于逆向运动学的实验准则,即通过手工标注的 3.2关节位置预测方法的改进 方式。手工标注的方式是通过人工标记获得实验图 计算旋转角的方法中有一步是预测关节在图像 片序列中运动目标关节的二维图像位置,通过这种方 中的位置,其利用X-1=[x,-1y-]T,X-2= 式获取的关节位置具有主观性,因此获得的关节位置 [x,-2水-2】T即在1-1与t-2时刻的最优估计位置 只能近似为真实的关节位置。 计算出V,-1=[x-1-x-2y-1-y-2]T关节在t-1 基于手工标注的主观性,提出了模拟仿真的方 时刻的速度,然后估计关节在t~1时刻的位置X,=式。模拟仿真的方式是通过某种方式根据运动目标 [x,少,]「。可以发现,该算法做了关节的运行模式是的关节位置,生成相应的图片序列并将其作为测试视 速度不变的假设,而真实的跟踪过程中关节的运动模频。此种方式获得的真实关节位置是相当可靠和准 型是变速的且带有随机性的,会导致他们的局部寻优确的。具体方法是测试图像序列由3DMax软件生公式为 α = arctan( 2(q2 q3 + q0 q1 ) q 2 0 - q 2 1 - q 2 2 + q 2 3 ) = arctan( - 2(q1 q3 - q0 q2 )) γ = arctan( 2(q1 q2 + q0 q3 ) q 2 0 + q 2 1 - q 2 2 - q 2 3 ) 图 5 欧拉角示意图 Fig.5 Euler Angle diagram 图 6 欧拉轴和旋转角示意图 Fig.6 Euler axis and rotation Angle 由上述计算过程可以看出,本文采用的计算旋转角的 方法是准确值,包括 α、β、γ 等 3 个旋转分量,所以能 够获得比通过逆向运动学计算更加准确的旋转角。 因此,最后的跟踪效果能够比基于逆向运动学的效果 要好,具体结果参见实验结果与分析部分。 3.2 关节位置预测方法的改进 计算旋转角的方法中有一步是预测关节在图像 中 的 位 置, 其 利 用 Xt-1 = xt-1 ,yt-1 [ ] T ,Xt-2 = xt-2 ,yt-2 [ ] T 即在 t - 1 与 t - 2 时刻的最 优估计位置 计算出 Vt-1 = xt-1 - xt-2 ,yt-1 - yt-2 [ ] T 关节在 t -1 时刻的速度,然后估计关节在 t-1 时刻的位置 Xt = xt,yt [ ] T 。 可以发现,该算法做了关节的运行模式是 速度不变的假设,而真实的跟踪过程中关节的运动模 型是变速的且带有随机性的,会导致他们的局部寻优 较慢,即迭代次数会变多;当预测位置出现较大偏差 时,关节位置不在寻优区域导致找不到准确位置,会 将错误的位置当做关节位置,进而影响算法后面的部 分,导致错误的跟踪。 因此,本文采用了粒子滤波的 方式[13]对关节位置进行预测。 下面只对粒子滤波的自回归过程进行介绍,其他 部分请参考文献[13]。 自回归过程是一种通过历史 数据来预测目前状态的时间序列建模策略。 在这个 模型里,目前的状态 xt 是一个依赖于以前状态的确 定性函数并加上随机干扰,假如确定性函数是线性 的,则目前的状态依赖于以前的 xp 个状态,模型可以 写成 xt = ∑ p i = 1 ∂i xt-i + ωt (7) ∂i { } p i = 1 是自回归系数; ωt 是随机干扰,一般情 况下是白噪声。 自回归系数既可通过学习的方法得 到[15] ,也可以由特别的方式指定[16] 。 由于跟踪目标 的连续性,采用变速模型更为适合一些,这里采用三 阶自回归模型: xt = Axt-1 + Bxt-2 + Cxt-3 + DN(0,∑) (8) 式中: {A,B,C,D} p i = 1 是自回归系数, N(0,∑) 是 零均值、标准方差为 1 的 Gaussian 噪声。 在试验中, 指定系数为 A = 2,B = - 2,C = 3,D= 1。 由上述计算过程可知,文中引入了变速模型和噪 声,变速模型相对匀速模型能够更准确地表示关节的 运动模型;引入噪声符合关节的运动具有随机性的特 性,即关节有时会发生微小抖动。 因此,本文方法相对基于逆向运动学的方法能够 更加准确地表示运动模型,进而能够更加有效的预测 关节的位置,从而为后续的局部寻优,提供一个有效 的预测,进而更加迅速和准确地找到最优估计,同时 也会减少准确位置在寻优区域外部的概率,最终能够 提高跟踪的速度和有效性。 具体结果参见实验结果 与分析部分。 3.3 实验准则的改进 基于逆向运动学的实验准则,即通过手工标注的 方式。 手工标注的方式是通过人工标记获得实验图 片序列中运动目标关节的二维图像位置,通过这种方 式获取的关节位置具有主观性,因此获得的关节位置 只能近似为真实的关节位置。 基于手工标注的主观性,提出了模拟仿真的方 式。 模拟仿真的方式是通过某种方式根据运动目标 的关节位置,生成相应的图片序列并将其作为测试视 频。 此种方式获得的真实关节位置是相当可靠和准 确的。 具体方法是测试图像序列由 3DMax 软件生 第 4 期 赵军,等:基于改进逆向运动学的人体运动跟踪 ·551·