正在加载图片...
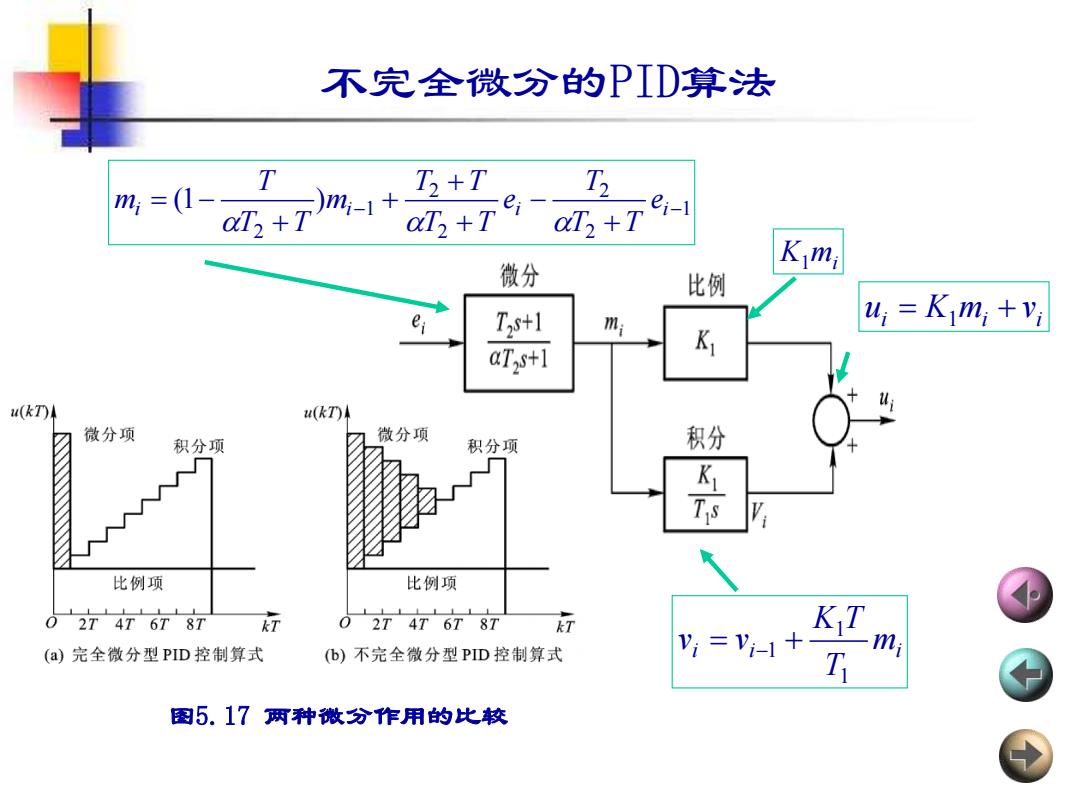
不完全微分的PID算法 Tm-1+ ☑+T T aT,+T aT +T ei al +T 微分 K mi 比例 e T2S+1 m u;Kimi +vi aT,s+l K u(kT)A (kT)4 微分项 微分项 积分项 积分项 积分 K 比例项 比例项 02T4T6T87 k行 O 2T 4T 6T 8T T KT (a)完全微分型PID控制算式 (b)不完全微分型PD控制算式 vi =vi-1+ m T 图5.17两种微分作用的比较不完全微分的PID算法 1 2 2 2 2 1 2 (1 ) − − + − + + + + i = − i i i e T T T e T T T T m T T T m i i mi T K T v v 1 1 = −1 + K1 mi i i i u = K m + v 1 图5.17 两种微分作用的比较