正在加载图片...
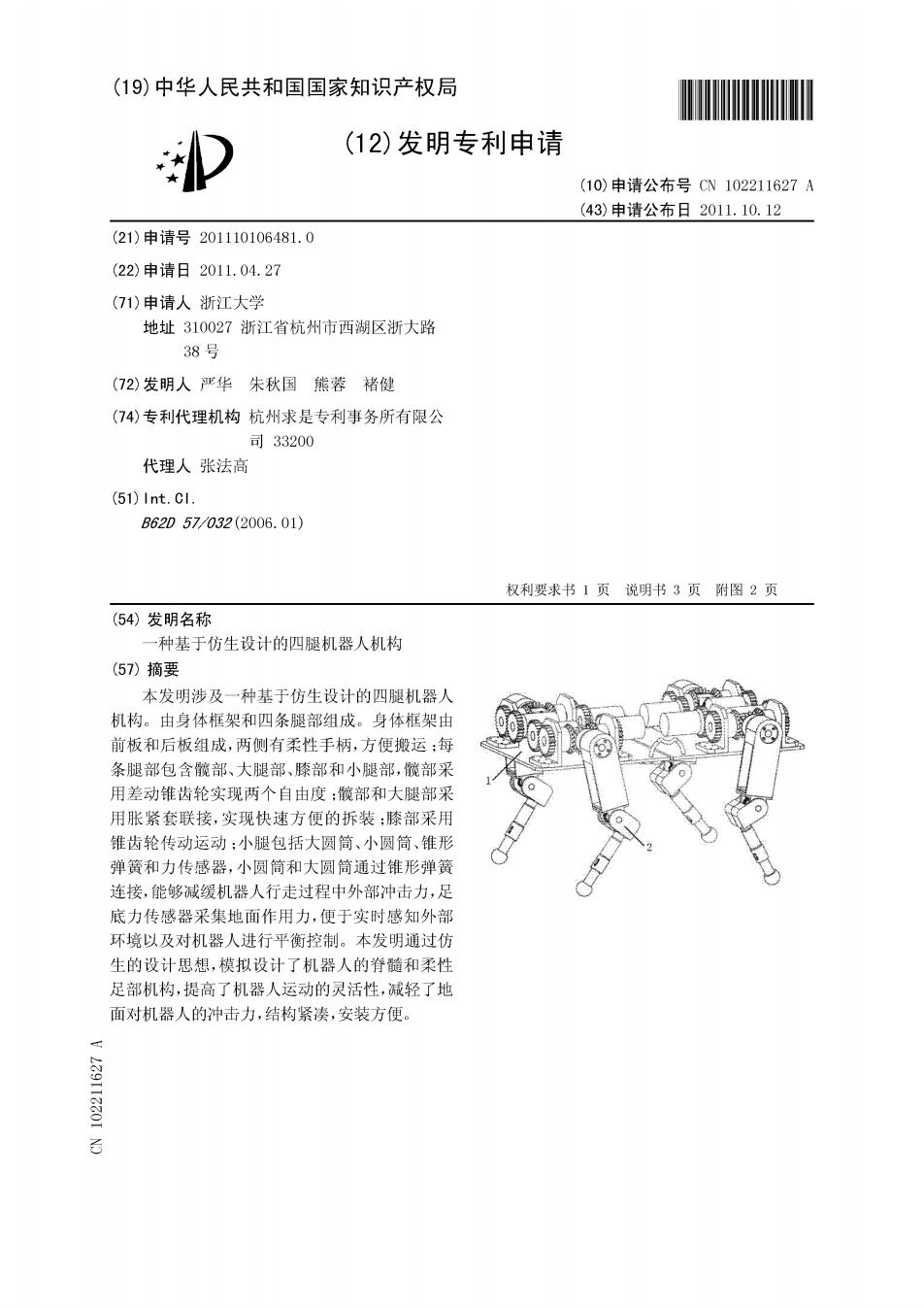
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN102211627A (43)申请公布日2011.10.12 (21)申请号201110106481.0 (22)申请日2011.04.27 (71)申请人浙江大学 地址310027浙江省杭州市西湖区浙大路 38号 (72)发明人严华朱秋国熊蓉褚健 (74)专利代理机构杭州求是专利事务所有限公 司33200 代理人张法高 (51)1nt.cl. B62057032(2006.01) 权利要求书1页说明书3页附图2页 (54)发明名称 一种基于仿生设计的四腿机器人机构 (57)摘要 本发明涉及一种基于仿生设计的四腿机器人 机构。由身体框架和四条腿部组成。身体框架由 前板和后板组成,两侧有柔性手柄,方便搬运:每 条腿部包含髋部、大腿部、膝部和小腿部,髋部采 用差动锥齿轮实现两个自由度:髋部和大腿部采 用胀紧套联接,实现快速方便的拆装:膝部采用 锥齿轮传动运动:小腿包括大圆筒、小圆筒、锥形 弹簧和力传感器,小圆筒和大圆筒通过锥形弹簧 连接,能够减缓机器人行走过程中外部冲击力,足 底力传感器采集地面作用力,便于实时感知外部 环境以及对机器人进行平衡控制。本发明通过仿 生的设计思想,模拟设计了机器人的脊髓和柔性 足部机构,提高了机器人运动的灵活性,减轻了地 面对机器人的冲击力,结构紧凑,安装方便。 A3912201