正在加载图片...
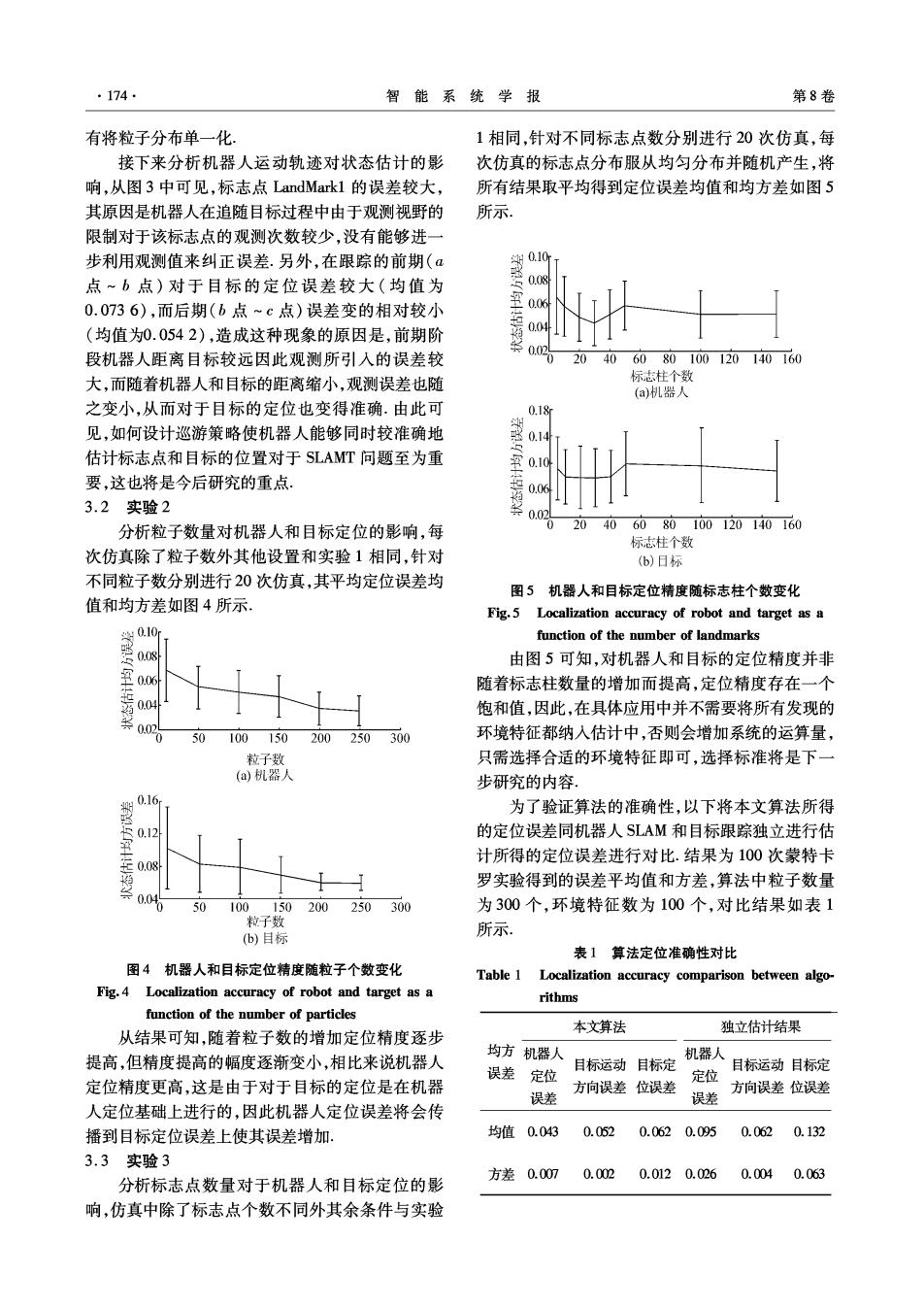
·174 智能系统学报 第8卷 有将粒子分布单一化 1相同,针对不同标志点数分别进行20次仿真,每 接下来分析机器人运动轨迹对状态估计的影 次仿真的标志点分布服从均匀分布并随机产生,将 响,从图3中可见,标志点LandMark1的误差较大, 所有结果取平均得到定位误差均值和均方差如图5 其原因是机器人在追随目标过程中由于观测视野的 所示 限制对于该标志点的观测次数较少,没有能够进一 步利用观侧值来纠正误差.另外,在跟踪的前期(α 点~b点)对于目标的定位误差较大(均值为 0.0736),而后期(b点~c点)误差变的相对较小 0.06 (均值为0.0542),造成这种现象的原因是,前期阶 0.04 段机器人距离目标较远因此观测所引人的误差较 20406080100120140160 大,而随着机器人和目标的距离缩小,观测误差也随 标志柱个数 (a)机器人 之变小,从而对于目标的定位也变得准确.由此可 0.18 见,如何设计巡游策略使机器人能够同时较准确地 0.14 估计标志点和目标的位置对于SLAMT问题至为重 0.10 要,这也将是今后研究的重点. 0.06 3.2实验2 分析粒子数量对机器人和目标定位的影响,每 020 406080100120140160 标志柱个数 次仿真除了粒子数外其他设置和实验1相同,针对 (b)日标 不同粒子数分别进行20次仿真,其平均定位误差均 图5机器人和目标定位精度随标志柱个数变化 值和均方差如图4所示, Fig.5 Localization accuracy of robot and target as a function of the number of landmarks 0.08 由图5可知,对机器人和目标的定位精度并非 随着标志柱数量的增加而提高,定位精度存在一个 0.04 饱和值,因此,在具体应用中并不需要将所有发现的 50100150 200250 300 环境特征都纳入估计中,否则会增加系统的运算量, 粒子数 只需选择合适的环境特征即可,选择标准将是下一 (a)机器人 步研究的内容 0.16 为了验证算法的准确性,以下将本文算法所得 0.12 的定位误差同机器人SLAM和目标跟踪独立进行估 计所得的定位误差进行对比.结果为100次蒙特卡 0.08 罗实验得到的误差平均值和方差,算法中粒子数量 0.04 50100150200250 300 为300个,环境特征数为100个,对比结果如表1 粒子数 (b)目标 所示 表1算法定位准确性对比 图4机器人和目标定位精度随粒子个数变化 Table 1 Localization accuracy comparison between algo- Fig.4 Localization accuracy of robot and target as a rithms function of the number of particles 本文算法 独立估计结果 从结果可知,随着粒子数的增加定位精度逐步 提高,但精度提高的幅度逐渐变小,相比来说机器人 均方机器人 机器人 误差定位 目标运动目标定 目标运动目标定 定位精度更高,这是由于对于目标的定位是在机器 方向误差 定位 位误差 误差 方向误差位误差 误差 人定位基础上进行的,因此机器人定位误差将会传 播到目标定位误差上使其误差增加, 均值0.043 0.052 0.0620.095 0.062 0.132 3.3实验3 方差0.007 0.002 0.0120.026 0.0040.063 分析标志点数量对于机器人和目标定位的影 响,仿真中除了标志点个数不同外其余条件与实验