正在加载图片...
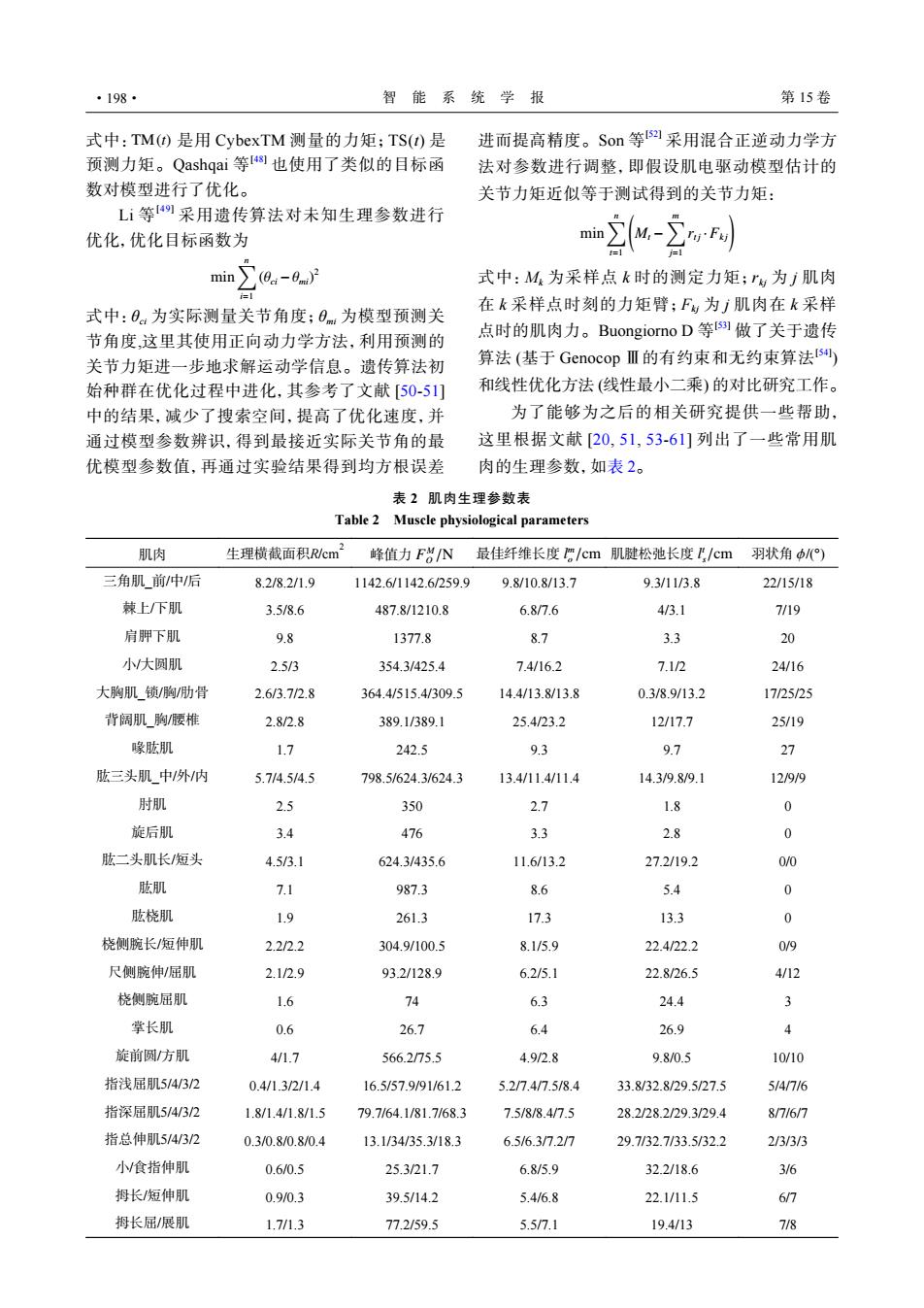
·198· 智能系统学报 第15卷 式中:TM()是用CybexTM测量的力矩;TS()是 进而提高精度。Son等s采用混合正逆动力学方 预测力矩。Qashqai等也使用了类似的目标函 法对参数进行调整,即假设肌电驱动模型估计的 数对模型进行了优化。 关节力矩近似等于测试得到的关节力矩: Lⅰ等采用遗传算法对未知生理参数进行 优化,优化目标函数为 =1 =1 min 式中:M为采样点k时的测定力矩;"为j肌肉 1 式中:0。为实际测量关节角度;0m为模型预测关 在k采样点时刻的力矩臂;F则为j肌肉在k采样 节角度,这里其使用正向动力学方法,利用预测的 点时的肌肉力。Buongiorno D等s]做了关于遗传 关节力矩进一步地求解运动学信息。遗传算法初 算法(基于GenocopⅢ的有约束和无约束算法s 始种群在优化过程中进化,其参考了文献[50-51] 和线性优化方法(线性最小二乘)的对比研究工作。 中的结果,减少了搜索空间,提高了优化速度,并 为了能够为之后的相关研究提供一些帮助, 通过模型参数辨识,得到最接近实际关节角的最 这里根据文献[20,51,53-61]列出了一些常用肌 优模型参数值,再通过实验结果得到均方根误差 肉的生理参数,如表2。 表2肌肉生理参数表 Table 2 Muscle physiological parameters 肌肉 生理横截面积Rcm2 峰值力FN最佳纤维长度匹/cm肌腱松弛长度':/cm 羽状角/() 三角肌_前仲后 8.2/8.2/1.9 1142.6/1142.6/259.9 9.8/10.8/13.7 9.3/11/3.8 22/15/18 棘上下肌 3.5/8.6 487.8/1210.8 6.87.6 4/3.1 7/19 肩胛下肌 9.8 1377.8 8.7 3.3 20 小大圆肌 2.5/3 354.3/425.4 7.4/16.2 7.12 24/16 大胸肌锁/胸/肋骨 2.6/3.7/2.8 364.4/515.4/309.5 14.4/13.8/13.8 0.3/8.9/13.2 17/25/25 背阔肌_胸/腰椎 2.8/2.8 389.1/389.1 25.4/23.2 12/17.7 25/19 喙肱肌 1.7 242.5 9.3 9.7 27 肱三头肌_中外内 5.7/4.5/4.5 798.5/624.3/624.3 13.4/11.4/11.4 14.3/9.8/9.1 12/9/9 肘肌 2.5 350 2.7 1.8 0 旋后肌 3.4 476 3.3 2.8 0 肱二头肌长短头 4.5/3.1 624.3/435.6 11.6/13.2 27.2/19.2 0/0 肱肌 7.1 987.3 8.6 5.4 0 肱桡肌 1.9 261.3 17.3 13.3 0 桡侧腕长/短伸肌 2.2/2.2 304.9/100.5 8.1/5.9 22.4/22.2 0/9 尺侧腕伸/屈肌 2.1/2.9 93.2/128.9 6.2/5.1 22.8/26.5 412 桡侧腕屈肌 1.6 74 6.3 24.4 掌长肌 0.6 26.7 6.4 26.9 4 旋前圆/方肌 4/1.7 566.2/75.5 4.92.8 9.8/0.5 10/10 指浅屈肌5/4/3/2 0.4/1.3/2/1.4 16.5/57.9/91/61.2 5.2/7.4/7.5/8.4 33.8/32.8/29.5/27.5 5/4/716 指深屈肌5/4/3/2 1.8/1.4/1.8/1.5 79.7/64.1/81.7168.3 7.5/8/8.4/7.5 28.2/28.2/29.3/29.4 87/6/7 指总伸肌5/4/32 0.3/0.8/0.8/0.4 13.1/34/35.3/18.3 6.516.3/7.2/7 29.7/32.7/33.5/32.2 2/3/3/3 小√食指伸肌 0.6/0.5 25.3/21.7 6.8/5.9 322/18.6 36 拇长/短伸肌 0.9/0.3 39.5/14.2 5.4/6.8 22.1/11.5 6/7 拇长屈/展肌 1.7/1.3 77.2/59.5 5.5/7.1 19.4/13 718式中: TM(t) 是用 CybexTM 测量的力矩;TS(t) 是 预测力矩。Qashqai 等 [48] 也使用了类似的目标函 数对模型进行了优化。 Li 等 [49] 采用遗传算法对未知生理参数进行 优化,优化目标函数为 min∑n i=1 (θci −θmi) 2 式中:θci 为实际测量关节角度;θmi 为模型预测关 节角度,这里其使用正向动力学方法,利用预测的 关节力矩进一步地求解运动学信息。遗传算法初 始种群在优化过程中进化,其参考了文献 [50-51] 中的结果,减少了搜索空间,提高了优化速度,并 通过模型参数辨识,得到最接近实际关节角的最 优模型参数值,再通过实验结果得到均方根误差 进而提高精度。Son 等 [52] 采用混合正逆动力学方 法对参数进行调整,即假设肌电驱动模型估计的 关节力矩近似等于测试得到的关节力矩: min∑n t=1 ( Mt − ∑m j=1 rt j · Fk j) 式中:Mk 为采样点 k 时的测定力矩;rkj 为 j 肌肉 在 k 采样点时刻的力矩臂;Fkj 为 j 肌肉在 k 采样 点时的肌肉力。Buongiorno D 等 [53] 做了关于遗传 算法 (基于 Genocop Ⅲ的有约束和无约束算法[54] ) 和线性优化方法 (线性最小二乘) 的对比研究工作。 为了能够为之后的相关研究提供一些帮助, 这里根据文献 [20, 51, 53-61] 列出了一些常用肌 肉的生理参数,如表 2。 表 2 肌肉生理参数表 Table 2 Muscle physiological parameters 肌肉 生理横截面积R/cm2 F M O 峰值力 /N l m o 最佳纤维长度 /cm l t s 肌腱松弛长度 /cm 羽状角 ϕ /(°) 三角肌_前/中/后 8.2/8.2/1.9 1142.6/1142.6/259.9 9.8/10.8/13.7 9.3/11/3.8 22/15/18 棘上/下肌 3.5/8.6 487.8/1210.8 6.8/7.6 4/3.1 7/19 肩胛下肌 9.8 1377.8 8.7 3.3 20 小/大圆肌 2.5/3 354.3/425.4 7.4/16.2 7.1/2 24/16 大胸肌_锁/胸/肋骨 2.6/3.7/2.8 364.4/515.4/309.5 14.4/13.8/13.8 0.3/8.9/13.2 17/25/25 背阔肌_胸/腰椎 2.8/2.8 389.1/389.1 25.4/23.2 12/17.7 25/19 喙肱肌 1.7 242.5 9.3 9.7 27 肱三头肌_中/外/内 5.7/4.5/4.5 798.5/624.3/624.3 13.4/11.4/11.4 14.3/9.8/9.1 12/9/9 肘肌 2.5 350 2.7 1.8 0 旋后肌 3.4 476 3.3 2.8 0 肱二头肌长/短头 4.5/3.1 624.3/435.6 11.6/13.2 27.2/19.2 0/0 肱肌 7.1 987.3 8.6 5.4 0 肱桡肌 1.9 261.3 17.3 13.3 0 桡侧腕长/短伸肌 2.2/2.2 304.9/100.5 8.1/5.9 22.4/22.2 0/9 尺侧腕伸/屈肌 2.1/2.9 93.2/128.9 6.2/5.1 22.8/26.5 4/12 桡侧腕屈肌 1.6 74 6.3 24.4 3 掌长肌 0.6 26.7 6.4 26.9 4 旋前圆/方肌 4/1.7 566.2/75.5 4.9/2.8 9.8/0.5 10/10 指浅屈肌5/4/3/2 0.4/1.3/2/1.4 16.5/57.9/91/61.2 5.2/7.4/7.5/8.4 33.8/32.8/29.5/27.5 5/4/7/6 指深屈肌5/4/3/2 1.8/1.4/1.8/1.5 79.7/64.1/81.7/68.3 7.5/8/8.4/7.5 28.2/28.2/29.3/29.4 8/7/6/7 指总伸肌5/4/3/2 0.3/0.8/0.8/0.4 13.1/34/35.3/18.3 6.5/6.3/7.2/7 29.7/32.7/33.5/32.2 2/3/3/3 小/食指伸肌 0.6/0.5 25.3/21.7 6.8/5.9 32.2/18.6 3/6 拇长/短伸肌 0.9/0.3 39.5/14.2 5.4/6.8 22.1/11.5 6/7 拇长屈/展肌 1.7/1.3 77.2/59.5 5.5/7.1 19.4/13 7/8 ·198· 智 能 系 统 学 报 第 15 卷