正在加载图片...
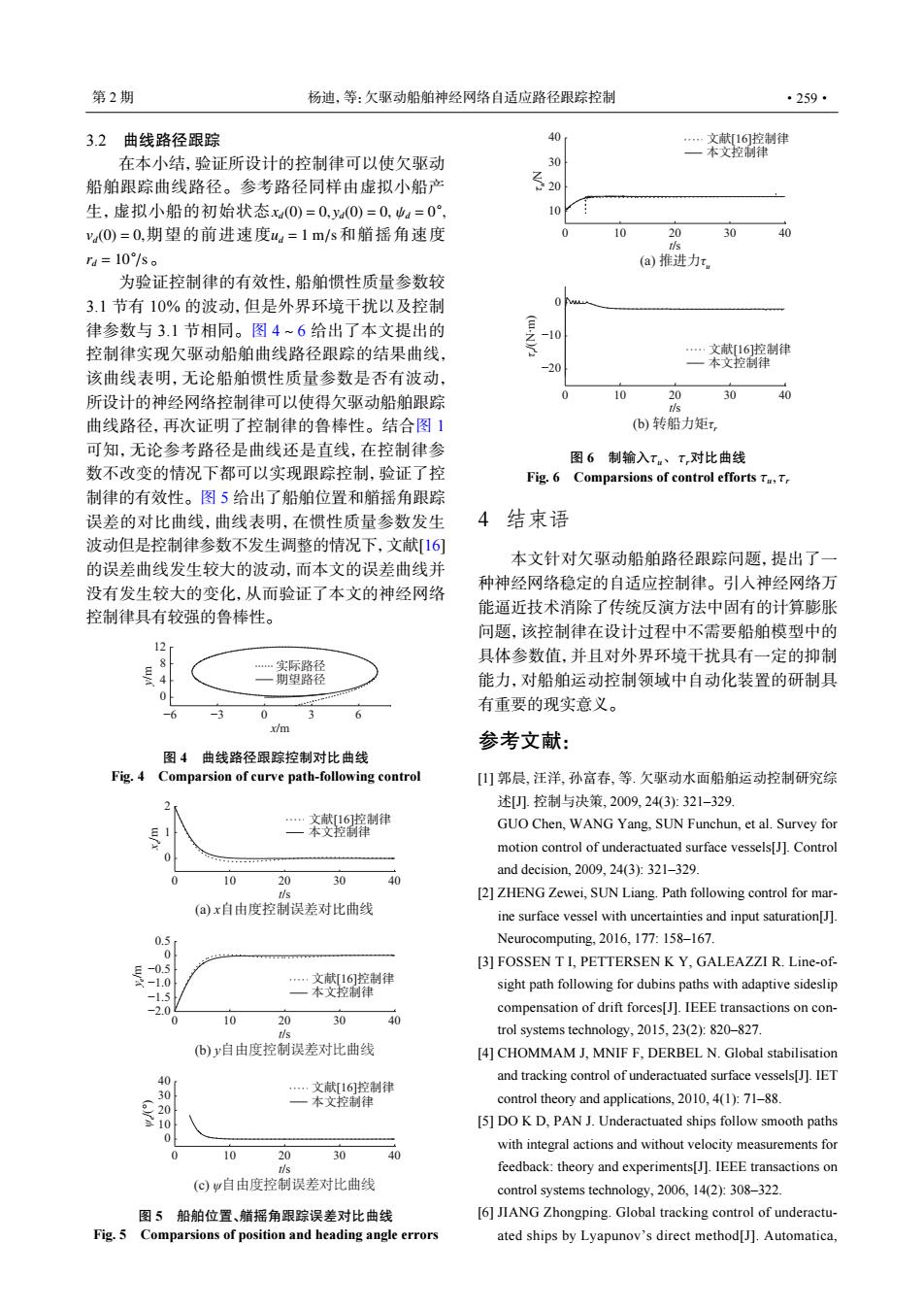
第2期 杨迪,等:欠驱动船舶神经网络自适应路径跟踪控制 ·259· 3.2曲线路径跟踪 40 …文献16控制律 一本文控制律 在本小结,验证所设计的控制律可以使欠驱动 30 船舶跟踪曲线路径。参考路径同样由虚拟小船产 20 生,虚拟小船的初始状态xa(O)=0,ya(0)=0,山a=0°, 10 v(O)=0,期望的前进速度4=1m/s和艏摇角速度 10 20 30 40 tis ra=10/s。 (a)推进力r。 为验证控制律的有效性,船舶惯性质量参数较 3.1节有10%的波动,但是外界环境干扰以及控制 律参数与3.1节相同。图4~6给出了本文提出的 -10 控制律实现欠驱动船舶曲线路径跟踪的结果曲线, …文献16控制律 20 本文控制律 该曲线表明,无论船舶惯性质量参数是否有波动, 所设计的神经网络控制律可以使得欠驱动船舶跟踪 10 20 40 曲线路径,再次证明了控制律的鲁棒性。结合图1 (b)转船力矩r 可知,无论参考路径是曲线还是直线,在控制律参 图6制输入T、T,对比曲线 数不改变的情况下都可以实现跟踪控制,验证了控 Fig.6 Comparsions of control efforts T, 制律的有效性。图5给出了船舶位置和艏摇角跟踪 误差的对比曲线,曲线表明,在惯性质量参数发生 4 结束语 波动但是控制律参数不发生调整的情况下,文献[16] 的误差曲线发生较大的波动,而本文的误差曲线并 本文针对欠驱动船舶路径跟踪问题,提出了一 没有发生较大的变化,从而验证了本文的神经网络 种神经网络稳定的自适应控制律。引入神经网络万 控制律具有较强的鲁棒性。 能逼近技术消除了传统反演方法中固有的计算膨胀 问题,该控制律在设计过程中不需要船舶模型中的 12 具体参数值,并且对外界环境干扰具有一定的抑制 …实际路径 4 期望路径 能力,对船舶运动控制领域中自动化装置的研制具 0 6 -3 0 3 6 有重要的现实意义。 m 参考文献: 图4曲线路径跟踪控制对比曲线 Fig.4 Comparsion of curve path-following control []郭晨,汪洋,孙富春,等.欠驱动水面船舶运动控制研究综 述.控制与决策,2009,24(3):321-329. ,文献16控制律 本文控制律 GUO Chen,WANG Yang,SUN Funchun,et al.Survey for motion control of underactuated surface vessels[J].Control 0 10 and decision,2009,24(3):321-329. 20 30 40 tis [2]ZHENG Zewei,SUN Liang.Path following control for mar- (a)x自由度控制误差对比曲线 ine surface vessel with uncertainties and input saturation[J]. 0 Neurocomputing,2016,177:158-167. 0 -0.5 [3]FOSSEN T I,PETTERSEN K Y,GALEAZZI R.Line-of- -1.0 …文献[16]控制律 sight path following for dubins paths with adaptive sideslip -1.5 本文控制律 -2 compensation of drift forces[J].IEEE transactions on con- 0 10 20 30 形 trol systems technology,2015,23(2):820-827 b)y自由度控制误差对比曲线 [4]CHOMMAM J,MNIF F,DERBEL N.Global stabilisation 0 and tracking control of underactuated surface vessels[J].IET 30 …文献[16控制律 一本文控制律 control theory and applications,2010,4(1):71-88. 10 [5]DO K D,PAN J.Underactuated ships follow smooth paths 0 with integral actions and without velocity measurements for 0 10 20 30 40 feedback:theory and experiments[J].IEEE transactions on (©)自由度控制误差对比曲线 control systems technology,2006,14(2):308-322 图5船舶位置、艏摇角跟踪误差对比曲线 [6]JIANG Zhongping.Global tracking control of underactu- Fig.5 Comparsions of position and heading angle errors ated ships by Lyapunov's direct method[J].Automatica,3.2 曲线路径跟踪 xd(0) = 0, yd(0) = 0, ψd = 0°, vd(0) = 0, ud = 1 m/s rd = 10°/s 在本小结,验证所设计的控制律可以使欠驱动 船舶跟踪曲线路径。参考路径同样由虚拟小船产 生,虚拟小船的初始状态 期望的前进速度 和艏摇角速度 。 为验证控制律的有效性,船舶惯性质量参数较 3.1 节有 10% 的波动,但是外界环境干扰以及控制 律参数与 3.1 节相同。图 4~6 给出了本文提出的 控制律实现欠驱动船舶曲线路径跟踪的结果曲线, 该曲线表明,无论船舶惯性质量参数是否有波动, 所设计的神经网络控制律可以使得欠驱动船舶跟踪 曲线路径,再次证明了控制律的鲁棒性。结合图 1 可知,无论参考路径是曲线还是直线,在控制律参 数不改变的情况下都可以实现跟踪控制,验证了控 制律的有效性。图 5 给出了船舶位置和艏摇角跟踪 误差的对比曲线,曲线表明,在惯性质量参数发生 波动但是控制律参数不发生调整的情况下,文献[16] 的误差曲线发生较大的波动,而本文的误差曲线并 没有发生较大的变化,从而验证了本文的神经网络 控制律具有较强的鲁棒性。 −6 −3 0 3 6 0 4 8 12 x/m y/m 䭱䌛ᒰ ᱇䌛ᒰ 图 4 曲线路径跟踪控制对比曲线 Fig. 4 Comparsion of curve path-following control 0 10 20 30 40 0 1 2 t/s ᪳⡚[16]ᣓݢᒷ ᱘᪳ᣓݢᒷ xe/m (a) x㜖⩝Ꮢᣓݢ䄛ጚᄥ℀ᰞ㏫ 0 10 20 30 40 −2.0 −1.5 −1.0 −0.5 0 0.5 t/s ᱘᪳ᣓݢᒷ y /me ᪳⡚[16]ᣓݢᒷ (b) y自由度控制误差对比曲线 0 10 20 30 40 0 10 20 30 40 t/s ᪳⡚[16]ᣓݢᒷ ᱘᪳ᣓݢᒷ ψe/(°) (c) ψ自由度控制误差对比曲线 图 5 船舶位置、艏摇角跟踪误差对比曲线 Fig. 5 Comparsions of position and heading angle errors 0 10 20 30 40 10 20 30 40 t/s ᪳⡚[16]ᣓݢᒷ ᱘᪳ᣓݢᒷ (a) ᣔ䔇߇τu τu/N 0 10 20 30 40 −20 −10 0 t/s ᪳⡚[16]ᣓݢᒷ ᱘᪳ᣓݢᒷ (b) 䒘㝥߇ⴕτr τr/(N·m) 图 τu、τr 6 制输入 对比曲线 Fig. 6 Comparsions of control efforts τu,τr 4 结束语 本文针对欠驱动船舶路径跟踪问题,提出了一 种神经网络稳定的自适应控制律。引入神经网络万 能逼近技术消除了传统反演方法中固有的计算膨胀 问题,该控制律在设计过程中不需要船舶模型中的 具体参数值,并且对外界环境干扰具有一定的抑制 能力,对船舶运动控制领域中自动化装置的研制具 有重要的现实意义。 参考文献: 郭晨, 汪洋, 孙富春, 等. 欠驱动水面船舶运动控制研究综 述[J]. 控制与决策, 2009, 24(3): 321–329. GUO Chen, WANG Yang, SUN Funchun, et al. Survey for motion control of underactuated surface vessels[J]. Control and decision, 2009, 24(3): 321–329. [1] ZHENG Zewei, SUN Liang. Path following control for marine surface vessel with uncertainties and input saturation[J]. Neurocomputing, 2016, 177: 158–167. [2] FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-ofsight path following for dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE transactions on control systems technology, 2015, 23(2): 820–827. [3] CHOMMAM J, MNIF F, DERBEL N. Global stabilisation and tracking control of underactuated surface vessels[J]. IET control theory and applications, 2010, 4(1): 71–88. [4] DO K D, PAN J. Underactuated ships follow smooth paths with integral actions and without velocity measurements for feedback: theory and experiments[J]. IEEE transactions on control systems technology, 2006, 14(2): 308–322. [5] JIANG Zhongping. Global tracking control of underactuated ships by Lyapunov’s direct method[J]. Automatica, [6] 第 2 期 杨迪,等:欠驱动船舶神经网络自适应路径跟踪控制 ·259·