正在加载图片...
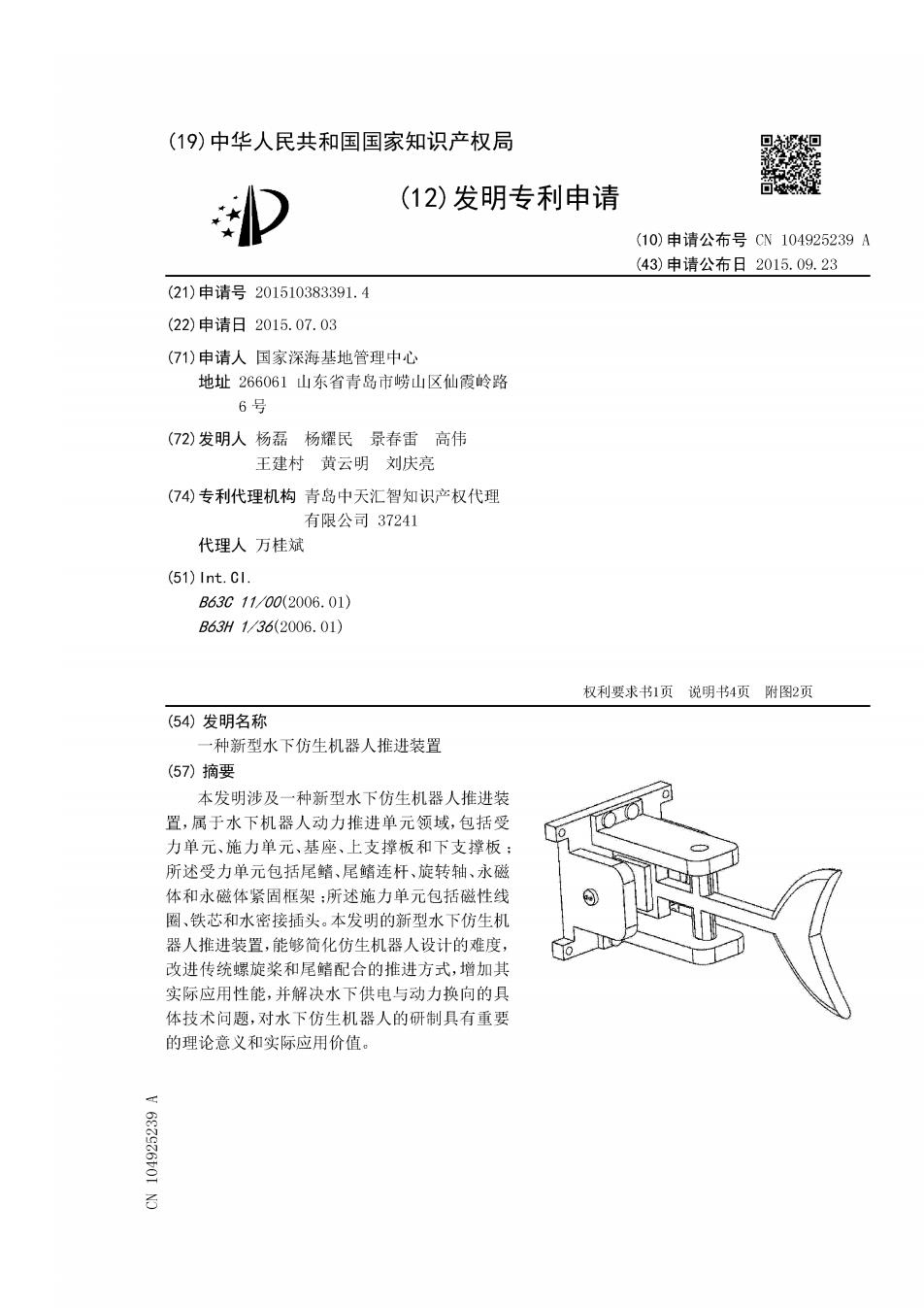
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104925239A (43)申请公布日2015.09.23 (21)申请号201510383391.4 (22)申请日2015.07.03 (71)申请人国家深海基地管理中心 地址266061山东省青岛市崂山区仙霞岭路 6号 (72)发明人杨磊杨耀民景春雷高伟 王建村黄云明刘庆亮 (74)专利代理机构青岛中天汇智知识产权代理 有限公司37241 代理人万桂斌 (51)nt.Cl. B63G1100(2006.01) B63H1/362006.01) 权利要求书1页说明书4页附图2页 (54)发明名称 种新型水下仿生机器人推进装置 (57)摘要 本发明涉及一种新型水下仿生机器人推进装 置,属于水下机器人动力推进单元领域,包括受 力单元、施力单元、基座、上支撑板和下支撑板: 所述受力单元包括尾鳍、尾鳍连杆、旋转轴、永磁 体和永磁体紧固框架:所述施力单元包括磁性线 圈、铁芯和水密接插头。本发明的新型水下仿生机 器人推进装置,能够简化仿生机器人设计的难度, 改进传统螺旋桨和尾鳍配合的推进方式,增加其 实际应用性能,并解决水下供电与动力换向的具 体技术问题,对水下仿生机器人的研制具有重要 的理论意义和实际应用价值。 993939501