正在加载图片...
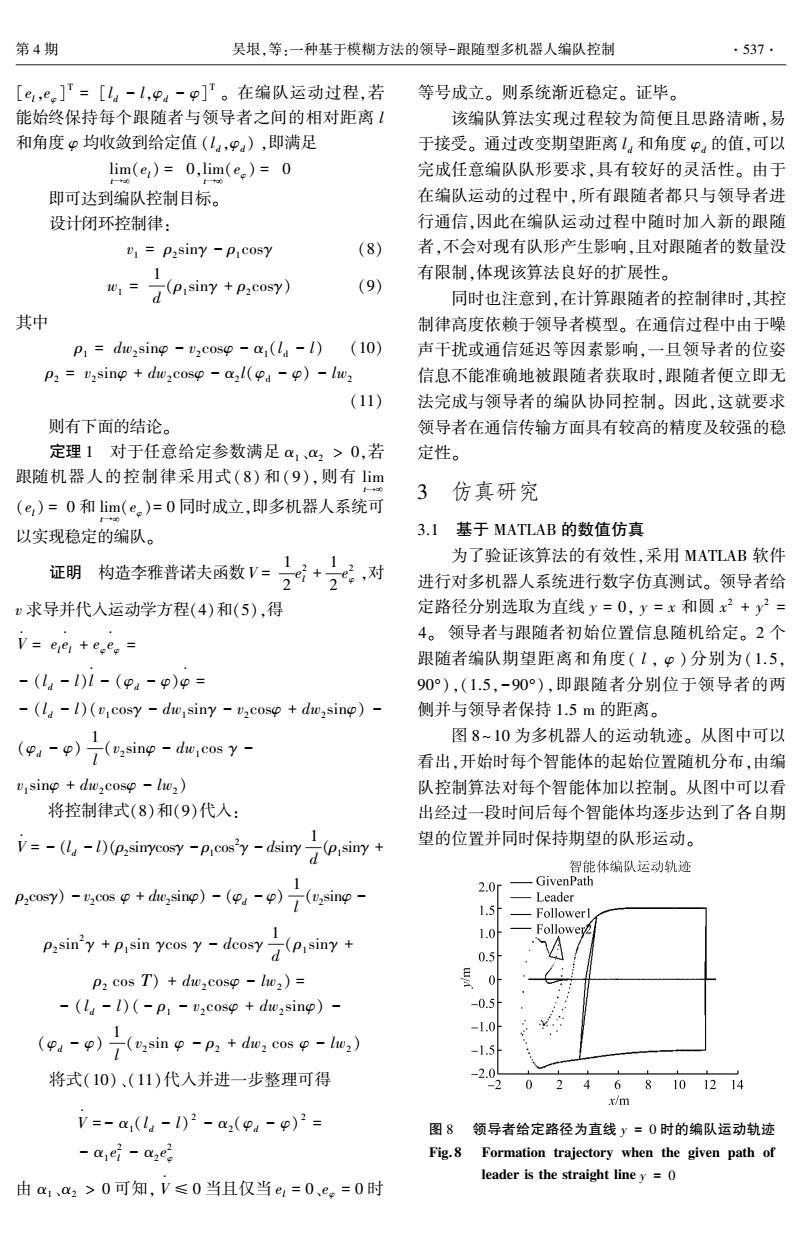
第4期 吴垠,等:一种基于模糊方法的领导-跟随型多机器人编队控制 .537. [e,e.]=[l4-L,9a-p]。在编队运动过程,若 等号成立。则系统渐近稳定。证毕。 能始终保持每个跟随者与领导者之间的相对距离L 该编队算法实现过程较为简便且思路清晰,易 和角度p均收敛到给定值(l4,P),即满足 于接受。通过改变期望距离L和角度P:的值,可以 lim(e,)=0,lim(e.)=0 完成任意编队队形要求,具有较好的灵活性。由于 即可达到编队控制目标。 在编队运动的过程中,所有跟随者都只与领导者进 设计闭环控制律: 行通信,因此在编队运动过程中随时加入新的跟随 v=Pasiny -p cosy (8) 者,不会对现有队形产生影响,且对跟随者的数量没 1 有限制,体现该算法良好的扩展性。 w,=dp:siny+p,eosy) (9) 同时也注意到,在计算跟随者的控制律时,其控 其中 制律高度依赖于领导者模型。在通信过程中由于噪 p=dwzsing vzcosop a (la-) (10) 声干扰或通信延迟等因素影响,一旦领导者的位姿 P2 vzsing dwzcoso-al(oa-)-lw2 信息不能准确地被跟随者获取时,跟随者便立即无 (11) 法完成与领导者的编队协同控制。因此,这就要求 则有下面的结论。 领导者在通信传输方面具有较高的精度及较强的稳 定理1对于任意给定参数满足a1、α>0,若 定性。 跟随机器人的控制律采用式(8)和(9),则有1im 3仿真研究 (e,)=0和lim(e.)=0同时成立,即多机器人系统可 以实现稳定的编队。 3.1基于MATLAB的数值仿真 为了验证该算法的有效性,采用MATLAB软件 证明构造李雅普诺夫函数V= 对 进行对多机器人系统进行数字仿真测试。领导者给 求导并代入运动学方程(4)和(5),得 定路径分别选取为直线y=0,y=x和圆x2+y2= 4。领导者与跟随者初始位置信息随机给定。2个 V=erer +eee= 跟随者编队期望距离和角度(1,p)分别为(1.5, (1-1)1-(-)= 90°),(1.5,-90),即跟随者分别位于领导者的两 -(-1)(v cosy dw siny -vcoso dwzsing)- 侧并与领导者保持1.5m的距离。 图8~10为多机器人的运动轨迹。从图中可以 ()(vsing-d cosy- 看出,开始时每个智能体的起始位置随机分布,由编 v sing dw,cosop -lw2) 队控制算法对每个智能体加以控制。从图中可以看 将控制律式(8)和(9)代入: 出经过一段时间后每个智能体均逐步达到了各自期 i=-(1)(p:simycosy -Prcos'y-dsinysiny 1 望的位置并同时保持期望的队形运动。 智能体编队运动轨迹 p,cosy)-t,cosp+dl,sing)-(pa-p)(v.sing- 2.0r GivenPath Leader 1.5 Followerl 1 1.0 Followey Pasin+p,sin ycosy-dcosysin 0.5 P2 cos T)+dwzcoso -lw2)= -((-p-v2coso dwzsing)- -0.5 1 -1.0h (e:-p)7(,sinp-p+de;cos-h,) -1.5 将式(10)、(11)代入并进一步整理可得 -2.04 -2 0 2468101214 x/m V=-a,(4-l)2-a2(pa-p)2= 图8领导者给定路径为直线y=0时的编队运动轨迹 -aei-aze Fig.8 Formation trajectory when the given path of leader is the straight liney =0 由a1、a2>0可知,V≤0当且仅当e1=0、e。=0时[el,eφ] T = [l d - l,φd - φ] T 。 在编队运动过程,若 能始终保持每个跟随者与领导者之间的相对距离 l 和角度 φ 均收敛到给定值 (l d ,φd ) ,即满足 lim t→¥ (el) = 0,lim t→¥ (eφ) = 0 即可达到编队控制目标。 设计闭环控制律: v1 = ρ2 sinγ - ρ1 cosγ (8) w1 = 1 d (ρ1 sinγ + ρ2 cosγ) (9) 其中 ρ1 = dw2 sinφ - v2 cosφ - α1(l d - l) (10) ρ2 = v2 sinφ + dw2 cosφ - α2 l(φd - φ) - lw2 (11) 则有下面的结论。 定理 1 对于任意给定参数满足 α1 、α2 > 0,若 跟随机器人的控制律采用式(8) 和(9),则有 lim t→¥ (el) = 0 和 lim t→¥ (eφ)= 0 同时成立,即多机器人系统可 以实现稳定的编队。 证明 构造李雅普诺夫函数 V = 1 2 e 2 l + 1 2 e 2 φ ,对 v 求导并代入运动学方程(4)和(5),得 V · = el e · l + eφ e · φ = - (l d - l)l · - (φd - φ)φ · = - (l d - l)(v1 cosγ - dw1 sinγ - v2 cosφ + dw2 sinφ) - (φd - φ) 1 l (v2 sinφ - dw1 cos γ - v1 sinφ + dw2 cosφ - lw2 ) 将控制律式(8)和(9)代入: V · = - (l d - l)(ρ2 sinγcosγ - ρ1 cos 2 γ - dsinγ 1 d (ρ1 sinγ + ρ2 cosγ) - v2 cos φ + dw2 sinφ) - (φd - φ) 1 l (v2 sinφ - ρ2 sin 2 γ + ρ1 sin γcos γ - dcosγ 1 d (ρ1 sinγ + ρ2 cos Τ) + dw2 cosφ - lw2 ) = - (l d - l)( - ρ1 - v2 cosφ + dw2 sinφ) - (φd - φ) 1 l (v2 sin φ - ρ2 + dw2 cos φ - lw2 ) 将式(10)、(11)代入并进一步整理可得 V · = - α1(l d - l) 2 - α2(φd - φ) 2 = - α1 e 2 l - α2 e 2 φ x 由 α1 、α2 > 0 可知, V · ≤ 0 当且仅当 el = 0、eφ = 0 时 等号成立。 则系统渐近稳定。 证毕。 该编队算法实现过程较为简便且思路清晰,易 于接受。 通过改变期望距离 l d 和角度 φd 的值,可以 完成任意编队队形要求,具有较好的灵活性。 由于 在编队运动的过程中,所有跟随者都只与领导者进 行通信,因此在编队运动过程中随时加入新的跟随 者,不会对现有队形产生影响,且对跟随者的数量没 有限制,体现该算法良好的扩展性。 同时也注意到,在计算跟随者的控制律时,其控 制律高度依赖于领导者模型。 在通信过程中由于噪 声干扰或通信延迟等因素影响,一旦领导者的位姿 信息不能准确地被跟随者获取时,跟随者便立即无 法完成与领导者的编队协同控制。 因此,这就要求 领导者在通信传输方面具有较高的精度及较强的稳 定性。 3 仿真研究 3.1 基于 MATLAB 的数值仿真 为了验证该算法的有效性,采用 MATLAB 软件 进行对多机器人系统进行数字仿真测试。 领导者给 定路径分别选取为直线 y = 0, y = x 和圆 x 2 + y 2 = 4。 领导者与跟随者初始位置信息随机给定。 2 个 跟随者编队期望距离和角度( l , φ ) 分别为(1.5, 90°),(1.5,-90°),即跟随者分别位于领导者的两 侧并与领导者保持 1.5 m 的距离。 图 8~10 为多机器人的运动轨迹。 从图中可以 看出,开始时每个智能体的起始位置随机分布,由编 队控制算法对每个智能体加以控制。 从图中可以看 出经过一段时间后每个智能体均逐步达到了各自期 望的位置并同时保持期望的队形运动。 图 8 领导者给定路径为直线 y = 0 时的编队运动轨迹 Fig. 8 Formation trajectory when the given path of leader is the straight line y = 0 第 4 期 吴垠,等:一种基于模糊方法的领导-跟随型多机器人编队控制 ·537·