正在加载图片...
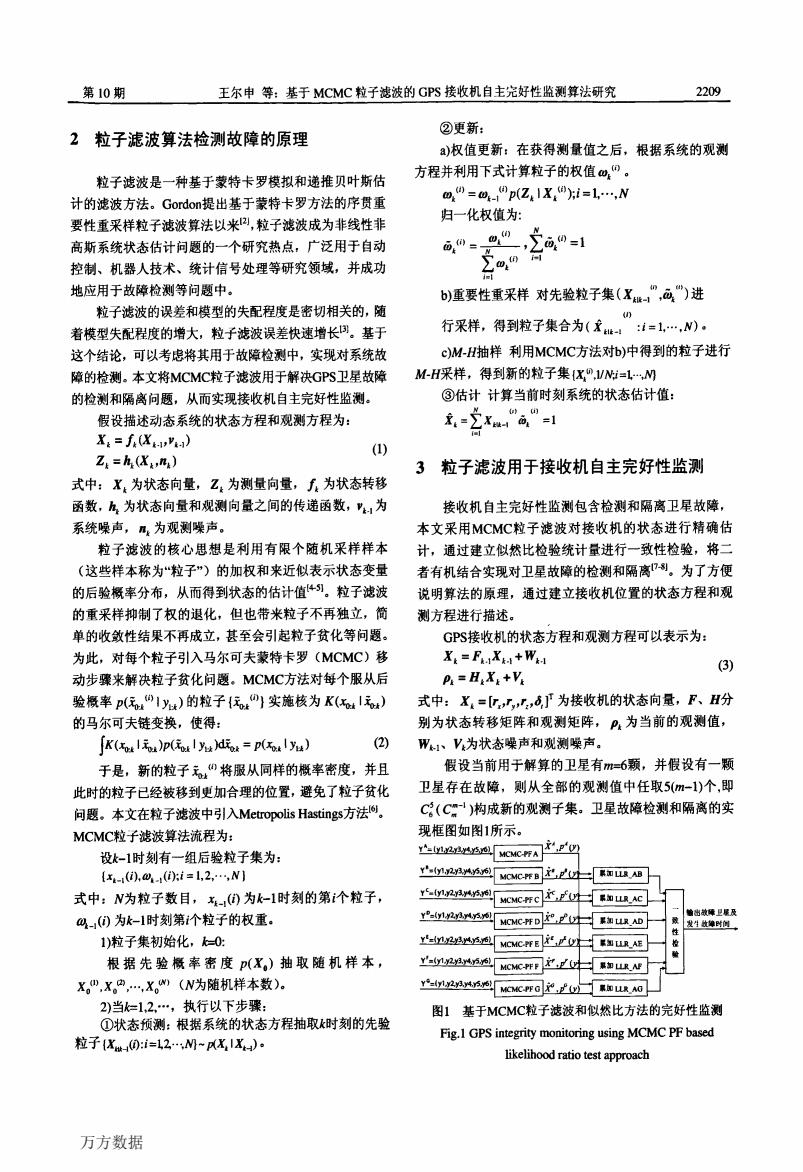
第10期 王尔申等:基于MCMC粒子滤波的GPS接收机自主完好性监测算法研究 2209 ②更新: 2粒子滤波算法检测故障的原理 )权值更新:在获得测量值之后,根据系统的观测 粒子滤波是一种基于蒙特卡罗模拟和递推贝叶斯估 方程并利用下式计算粒子的权值@。 计的滤波方法。Gordon提出基于蒙特卡罗方法的序贯重 o,0=00p(Z1Xi=1…,N 要性重采样粒子滤波算法以米以,粒子滤波成为非线性非 归一化权值为: 高斯系统状态估计问题的一个研究热点,广泛用于自动 控制、机器人技术、统计信号处理等研究领域,并成功 地应用于故障检测等问题中。 b)重要性重采样对先验粒子集(X”,4”)进 粒子滤波的误差和模型的失配程度是密切相关的,随 着模型失配程度的增大,粒子滤波误差快速增长间。基于 行采样,得到粒子集合为(京4=1…,)。 这个结论,可以考虑将其用于故障检测中,实现对系统故 c)M-H抽样利用MCMC方法对b)中得到的粒子进行 障的检测。本文将MCMC粒子滤波用于解决GPS卫星故障 M-H采样,得到新的粒子集X,N=LM 的检测和隔离问题,从而实现接收机自主完好性监测。 ③估计计算当前时刻系统的状态估计值: 假设描述动态系统的状态方程和观测方程为: 元-2xu”画,”=1 X:=f(XVa) (1) Z=h(X:,m) 3粒子滤波用于接收机自主完好性监测 式中:X:为状态向量,乙:为测量向量,∫:为状态转移 函数,h,为状态向量和观测向量之间的传递函数,”,为 接收机自主完好性监测包含检测和隔离卫尾故障, 系统噪声,为观测噪声。 本文采用MCMC粒子滤波对接收机的状态进行精确估 粒子滤波的核心思想是利用有限个随机采样样本 计,通过建立似然比检验统计量进行一致性检验,将二 (这些样本称为“粒子”)的加权和来近似表示状态变量 者有机结合实现对卫星故障的检测和隔离”。为了方便 的后验概率分布,从而得到状态的估计值4。粒子滤波 说明算法的原理,通过建立接收机位置的状态方程和观 的重采样抑制了权的退化,但也带米粒子不再独立,简 测方程进行描述。 单的收敛性结果不再成立,甚至会引起粒子贫化等问题。 GPS接收机的状态方程和观测方程可以表示为: 为此,对每个粒子引入马尔可夫蒙特卡罗(MCMC)移 Xt=FXE1+W (3) 动步骤来解决粒子贫化问题。MCMC方法对每个服从后 P=HX:+V 验概率p(元t9Iyt)的粒子{民)实施核为K(I元) 式中:X。=,,6为接收机的状态向量,F、H分 的马尔可夫链变换,使得: 别为状态转移矩阵和观测矩阵,P.为当前的观测值, K(ul元u)p(元Iy)dfoz=p(xol yu) (2) W1、V为状态噪声和观测噪声。 于是,新的粒子元”将服从同样的概率密度,并且 假设当前用于解算的卫星有m=6颗,并假设有一颗 此时的粒子已经被移到更加合理的位置,避免了粒子贫化 卫星存在故障,则从全部的观测值中任取5(m-1)个,即 问题。本文在粒子滤波中引入Metropolis Hastings方法。 C(C-)构成新的观测子集。卫星故障检测和隔离的实 MCMC粒子滤波算法流程为: 现框图如图1所示。 设k-1时刻有一组后验粒子集为: MCMC-PFA x.F'o) {x-),0(ii=12,W] mnA46 MCMC-PFB衫,E系TuRB 式中:N为粒子数目,-()为k-1时刻的第i个粒子, Y-y12y4y561 MCMC-FCpE4 果知LRAC -()为k-1时刻第个粒子的权重。 Yy12 MCMC-PED 敏出放难卫展及 暴知RAD 发生数雄时创 性 1)粒子集初始化,k-0: Y'inyrysre MCMCPFE 某红山RAE 根据先验概奉密度(X。)抽取随机样本, Yn2an6Mwc胖日t,卫4 暴如山R想 X,",X。,,X。)(N为随机样本数)。 产n26Mkcp可,LLR.AG 2)当k=1,2.…,执行以下步骤: 图1基于MCMC粒子滤波和似然比方法的完好性监测 ①状态预测:根据系统的状态方程抽取k时刻的先验 Fig.1 GPS integrity monitoring using MCMC PF based 粒子(Xw-0:i=12-p风XIX) likelihood ratio test approach 万方数据第10期 王尔申等:基于MCMC粒子滤波的GPS接收机自主完好性监测算法研究 2粒子滤波算法检测故障的原理 粒子滤波是一种基于蒙特卡罗模拟和递推贝叶斯估 计的滤波方法。Gordon提出基于蒙特卡罗方法的序贯重 要性重采样粒子滤波算法以来【2J,粒子滤波成为非线性非 高斯系统状态估计问题的一个研究热点,广泛用于自动 控制、机器人技术、统计信号处理等研究领域,并成功 地应用于故障检测等问题中。 粒子滤波的误差和模型的失配程度是密切相关的,随 着模型失配程度的增大,粒子滤波误差快速增长13】。基于 这个结论,可以考虑将其用于故障检测中,实现对系统故 障的检测。本文将MCMC粒子滤波用于解决GPS卫星故障 的检测和隔离问题,从而实现接收机自主完好性监测。 假设描述动态系统的状态方程和观测方程为: Xt=^Ⅸ¨,%.1) … Zt=魄伍t,nt) 一 式中:x。为状态向量,z。为测量向量,六为状态转移 函数,鬼为状态向量和观测向量之间的传递函数,吨..为 系统噪声,巩为观测噪声。 粒子滤波的核心思想是利用有限个随机采样样本 (这些样本称为“粒子”)的加权和来近似表示状态变量 的后验概率分布,从而得到状态的估计值∽l。粒子滤波 的重采样抑制了权的退化,但也带来粒子不再独立,简 单的收敛性结果不再成立,甚至会引起粒子贫化等问题。 为此,对每个粒子引入马尔可夫蒙特卡罗(MCMC)移 动步骤来解决粒子贫化问题。MCMC方法对每个服从后 验概率p(矗。“’I Yl:t)的粒子{瓦I“’J实施核为K(黾t l瓦t) 的马尔可夫链变换,使得: lK(黾t I瓦I)p(兔t yl:I)d黾女=p(%t I yl:t) (2) 于是,新的粒子氧。“’将服从同样的概率密度,并且 此时的粒子已经被移到更加合理的位置,避免了粒子贫化 问题。本文在粒子滤波中引入Metropolis Hastings方法州。 MCMC粒子滤波算法流程为: 设扣1时刻有一组后验粒子集为: {^一l(f),峨一1(f);f=l,2,…,N l 式中:Jv为粒子数目,Xk。(f)为k—l时刻的第f个粒子, 哦一。(f)为如l时刻第i个粒子的权重。 1)粒子集初始化,七=o: 根据先验概率密度p(X。)抽取随机样本, xo(”,xo【2),…,xotN’(^伪随机样本数)。 2)当拓1,2,…,执行以下步骤: ①状态预测:根据系统的状态方程抽取k时刻的先验 粒于{‰。④:i=LZ—jM一仄墨I墨4)。 ②更新: a)权值更新:在获得测量值之后,根据系统的观测 方程并利用下式计算粒子的权值q“)。 魄‘‘’=魄一1‘“p(Zt l X^‘‘’);f_l,…,N 归一化权值为: 噍m=半兰,∑瓴“)-l ∑‰“川司 b)重要性重采样对先验粒子集(xm—if),晚“’)进 行采样,得到粒子集合为(萱。一。 :f=1,…,Ⅳ)。 c)M-H抽样利用MCMC方法对b)中得到的粒子进行 肛H采样,得到新的粒子集{墨∞,llN;i=l,…,Ⅳ} ③估计计算当前时刻系统的状态估计值: 毫=羔x。一。。’∥=1 3粒子滤波用于接收机自主完好性监测 接收机自主完好性监测包含检测和隔离卫星故障, 本文采用MCMC粒子滤波对接收机的状态进行精确估 计,通过建立似然比检验统计量进行一致性检验,将二 者有机结合实现对卫星故障的检测和隔副7{】。为了方便 说明算法的原理,通过建立接收机位置的状态方程和观 测方程进行描述。 GPS接收机的状态方程和观测方程可以表示为: Xt=B.1X¨4-眠.1 m 见=日^Xt 4-K 一 式中:X。=k,,v,t,4】7为接收机的状态向量,,、日分 别为状态转移矩阵和观测矩阵,仇为当前的观测值, Wt_1、K为状态噪声和观测噪声。 假设当前用于解算的卫星有m=6颗,并假设有一颗 卫星存在故障,则从全部的观测值中任取5(m—1)个,即 a(c:’1)构成新的观测子集。卫星故障检测和隔离的实 现框图如图l所示。 !::!塑:鳖些苎堕型 !::!!!,堡塑型堕! .y...rs.=...(.y..I,.,.y..2.,.y..3..,y..4..,.y..S..,y—6.} !!苎!坦:坦芝垃堂堕鲤l Ye=(yl,y2.y3,y4,yS,y6). yG=(yl,y2,y3,y4,yS,y6) MCMC.-PFA l_XA'p* 磊翮室:芝 MCMC-PF C 丽翮坐:芝 孟i:品刁坐:芝 面翮堑:£ 磊翮p., :l输出故障卫星及 瓤l发q故障时间 性r————一 检I 验l 图1基于MCMC粒子滤波和似然比方法的完好性监测 Fig.1 GPS integdty monitoring using MCMC PF based likelihood ratio test approach =蒜垂堑~ 万方数据