正在加载图片...
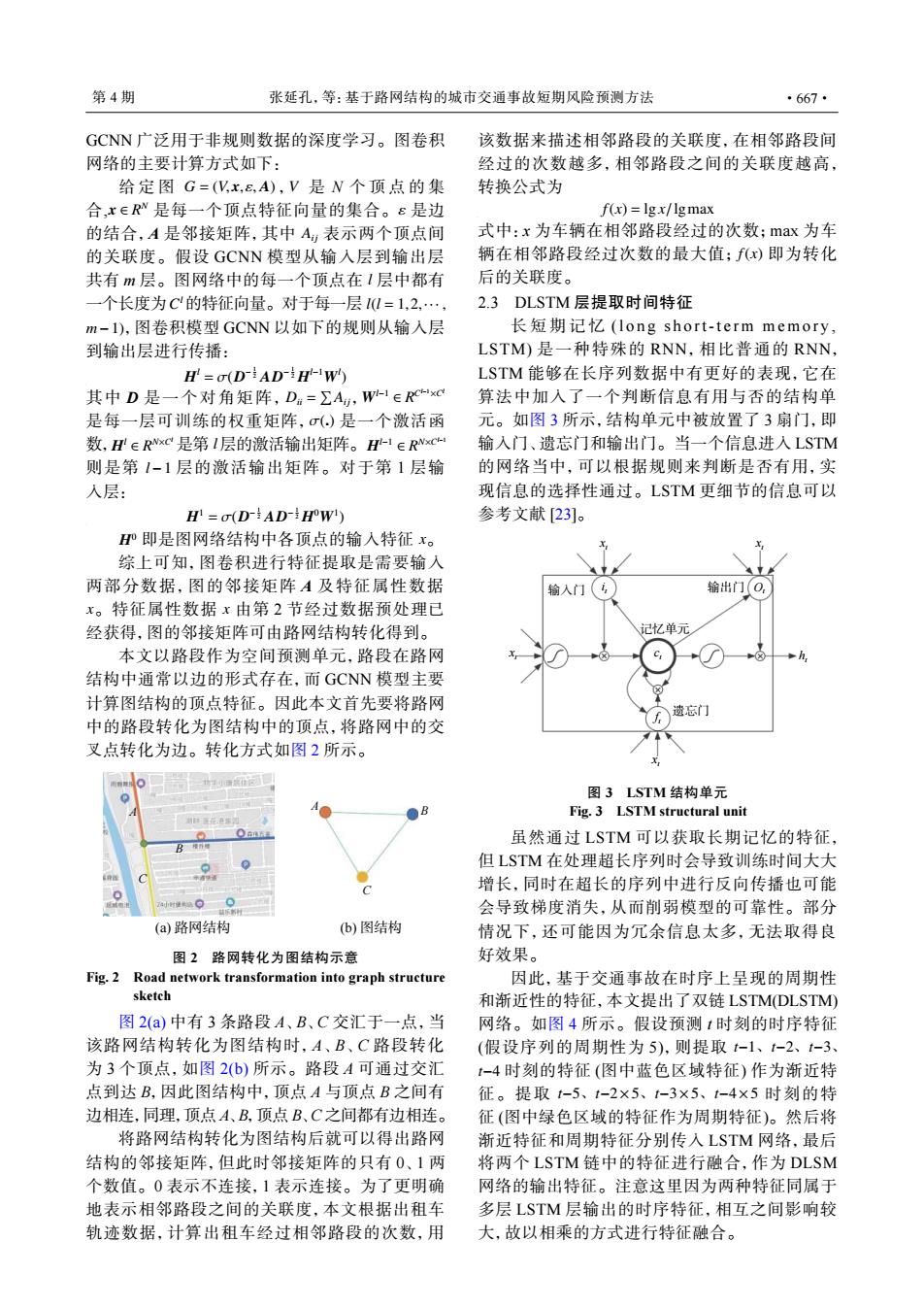
第4期 张延孔,等:基于路网结构的城市交通事故短期风险预测方法 ·667· GCNN广泛用于非规则数据的深度学习。图卷积 该数据来描述相邻路段的关联度,在相邻路段间 网络的主要计算方式如下: 经过的次数越多,相邻路段之间的关联度越高, 给定图G=(V,x,8,A),V是N个顶点的集 转换公式为 合,x∈R是每一个顶点特征向量的集合。ε是边 f(x)=lgx/lgmax 的结合,A是邻接矩阵,其中A表示两个顶点间 式中:x为车辆在相邻路段经过的次数;max为车 的关联度。假设GCNN模型从输入层到输出层 辆在相邻路段经过次数的最大值;fx)即为转化 共有m层。图网络中的每一个顶点在1层中都有 后的关联度。 一个长度为C的特征向量。对于每一层10=1,2,…, 2.3 DLSTM层提取时间特征 m-1),图卷积模型GCNN以如下的规则从输入层 长短期记忆(long short-term memory, 到输出层进行传播: LSTM)是一种特殊的RNN,相比普通的RNN, H=o(D-AD-H-W) LSTM能够在长序列数据中有更好的表现,它在 其中D是一个对角矩阵,Da=∑A),W1 ERCHxC 算法中加入了一个判断信息有用与否的结构单 是每一层可训练的权重矩阵,σ(.)是一个激活函 元。如图3所示,结构单元中被放置了3扇门,即 数,HIE RNxC是第I层的激活输出矩阵。H-I∈Rxc 输入门、遗忘门和输出门。当一个信息进入LSTM 则是第1-1层的激活输出矩阵。对于第1层输 的网络当中,可以根据规则来判断是否有用,实 入层: 现信息的选择性通过。LSTM更细节的信息可以 H=(D-:AD-HW) 参考文献[23] H即是图网络结构中各顶点的输入特征x。 综上可知,图卷积进行特征提取是需要输入 两部分数据,图的邻接矩阵A及特征属性数据 输人门( 输出门(O, x。特征属性数据x由第2节经过数据预处理已 经获得,图的邻接矩阵可由路网结构转化得到。 记忆单元 本文以路段作为空间预测单元,路段在路网 结构中通常以边的形式存在,而GCNN模型主要 计算图结构的顶点特征。因此本文首先要将路网 遗忘门 中的路段转化为图结构中的顶点,将路网中的交 叉点转化为边。转化方式如图2所示。 小 图3LSTM结构单元 Fig.3 LSTM structural unit ●中 B司 虽然通过LSTM可以获取长期记忆的特征, 但LSTM在处理超长序列时会导致训练时间大大 C 增长,同时在超长的序列中进行反向传播也可能 会导致梯度消失,从而削弱模型的可靠性。部分 (a)路网结构 b)图结构 情况下,还可能因为冗余信息太多,无法取得良 图2路网转化为图结构示意 好效果。 Fig.2 Road network transformation into graph structure 因此,基于交通事故在时序上呈现的周期性 sketch 和渐近性的特征,本文提出了双链LSTM(DLSTM) 图2(a)中有3条路段A、B、C交汇于一点,当 网络。如图4所示。假设预测1时刻的时序特征 该路网结构转化为图结构时,A、B、C路段转化 (假设序列的周期性为5),则提取t-1、t-2、t-3、 为3个顶点,如图2(b)所示。路段A可通过交汇 -4时刻的特征(图中蓝色区域特征)作为渐近特 点到达B,因此图结构中,顶点A与顶点B之间有 征。提取t-5、1-2×5、t-3×5、1-4×5时刻的特 边相连,同理,顶点A、B,顶点B、C之间都有边相连。 征(图中绿色区域的特征作为周期特征)。然后将 将路网结构转化为图结构后就可以得出路网 渐近特征和周期特征分别传入LSTM网络,最后 结构的邻接矩阵,但此时邻接矩阵的只有0、1两 将两个LSTM链中的特征进行融合,作为DLSM 个数值。0表示不连接,1表示连接。为了更明确 网络的输出特征。注意这里因为两种特征同属于 地表示相邻路段之间的关联度,本文根据出租车 多层LSTM层输出的时序特征,相互之间影响较 轨迹数据,计算出租车经过相邻路段的次数,用 大,故以相乘的方式进行特征融合。GCNN 广泛用于非规则数据的深度学习。图卷积 网络的主要计算方式如下: G = (V, x,ε, A) V x ∈ R N ε Ai j l C l l(l = 1,2,··· , m−1) 给定图 , 是 N 个顶点的集 合, 是每一个顶点特征向量的集合。 是边 的结合,A 是邻接矩阵,其中 表示两个顶点间 的关联度。假设 GCNN 模型从输入层到输出层 共有 m 层。图网络中的每一个顶点在 层中都有 一个长度为 的特征向量。对于每一层 ,图卷积模型 GCNN 以如下的规则从输入层 到输出层进行传播: H l = σ(D − 1 2 AD− 1 2 H l−1Wl ) Dii = ∑ Ai j Wl−1 ∈ R C l−1×C l σ() Hl ∈ R N×C l l Hl−1 ∈ R N×C l−1 l−1 其中 D 是一个对角矩阵, , 是每一层可训练的权重矩阵, 是一个激活函 数, 是第 层的激活输出矩阵。 则是第 层的激活输出矩阵。对于第 1 层输 入层: H 1 = σ(D − 1 2 AD− 1 2 H 0W1 ) H0 即是图网络结构中各顶点的输入特征 x。 x x 综上可知,图卷积进行特征提取是需要输入 两部分数据,图的邻接矩阵 A 及特征属性数据 。特征属性数据 由第 2 节经过数据预处理已 经获得,图的邻接矩阵可由路网结构转化得到。 本文以路段作为空间预测单元,路段在路网 结构中通常以边的形式存在,而 GCNN 模型主要 计算图结构的顶点特征。因此本文首先要将路网 中的路段转化为图结构中的顶点,将路网中的交 叉点转化为边。转化方式如图 2 所示。 (a) 路网结构 (b) 图结构 A B A B C C 图 2 路网转化为图结构示意 Fig. 2 Road network transformation into graph structure sketch 图 2(a) 中有 3 条路段 A、B、C 交汇于一点,当 该路网结构转化为图结构时,A、B、C 路段转化 为 3 个顶点,如图 2(b) 所示。路段 A 可通过交汇 点到达 B,因此图结构中,顶点 A 与顶点 B 之间有 边相连,同理,顶点 A、B,顶点 B、C 之间都有边相连。 将路网结构转化为图结构后就可以得出路网 结构的邻接矩阵,但此时邻接矩阵的只有 0、1 两 个数值。0 表示不连接,1 表示连接。为了更明确 地表示相邻路段之间的关联度,本文根据出租车 轨迹数据,计算出租车经过相邻路段的次数,用 该数据来描述相邻路段的关联度,在相邻路段间 经过的次数越多,相邻路段之间的关联度越高, 转换公式为 f(x) = lg x/ lgmax f(x) 式中:x 为车辆在相邻路段经过的次数;max 为车 辆在相邻路段经过次数的最大值; 即为转化 后的关联度。 2.3 DLSTM 层提取时间特征 长短期记 忆 (long short-term memory, LSTM) 是一种特殊的 RNN,相比普通的 RNN, LSTM 能够在长序列数据中有更好的表现,它在 算法中加入了一个判断信息有用与否的结构单 元。如图 3 所示,结构单元中被放置了 3 扇门,即 输入门、遗忘门和输出门。当一个信息进入 LSTM 的网络当中,可以根据规则来判断是否有用,实 现信息的选择性通过。LSTM 更细节的信息可以 参考文献 [23]。 输入门 xt xt ht Ot xt it 输出门 记忆单元 ct ft xt 遗忘门 图 3 LSTM 结构单元 Fig. 3 LSTM structural unit 虽然通过 LSTM 可以获取长期记忆的特征, 但 LSTM 在处理超长序列时会导致训练时间大大 增长,同时在超长的序列中进行反向传播也可能 会导致梯度消失,从而削弱模型的可靠性。部分 情况下,还可能因为冗余信息太多,无法取得良 好效果。 t−1、t−2、t−3、 t−4 t−5、t−2×5、t−3×5、t−4×5 因此,基于交通事故在时序上呈现的周期性 和渐近性的特征,本文提出了双链 LSTM(DLSTM) 网络。如图 4 所示。假设预测 t 时刻的时序特征 (假设序列的周期性为 5),则提取 时刻的特征 (图中蓝色区域特征) 作为渐近特 征。提取 时刻的特 征 (图中绿色区域的特征作为周期特征)。然后将 渐近特征和周期特征分别传入 LSTM 网络,最后 将两个 LSTM 链中的特征进行融合,作为 DLSM 网络的输出特征。注意这里因为两种特征同属于 多层 LSTM 层输出的时序特征,相互之间影响较 大,故以相乘的方式进行特征融合。 第 4 期 张延孔,等:基于路网结构的城市交通事故短期风险预测方法 ·667·