正在加载图片...
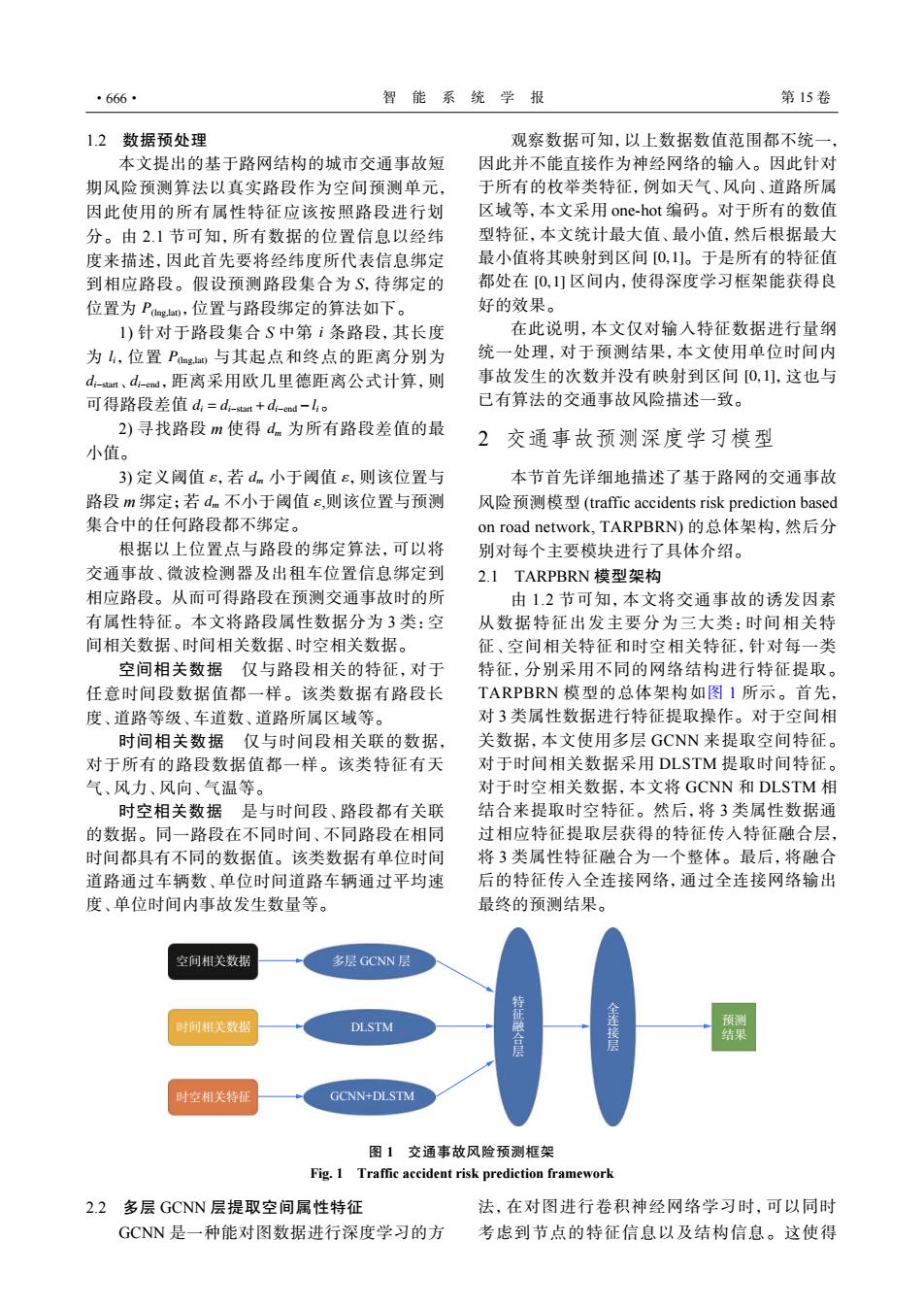
·666· 智能系统学报 第15卷 1.2数据预处理 观察数据可知,以上数据数值范围都不统一, 本文提出的基于路网结构的城市交通事故短 因此并不能直接作为神经网络的输入。因此针对 期风险预测算法以真实路段作为空间预测单元, 于所有的枚举类特征,例如天气、风向、道路所属 因此使用的所有属性特征应该按照路段进行划 区域等,本文采用one-hot编码。对于所有的数值 分。由21节可知,所有数据的位置信息以经纬 型特征,本文统计最大值、最小值,然后根据最大 度来描述,因此首先要将经纬度所代表信息绑定 最小值将其映射到区间0,1]。于是所有的特征值 到相应路段。假设预测路段集合为S,待绑定的 都处在[0,1]区间内,使得深度学习框架能获得良 位置为Pgsn,位置与路段绑定的算法如下。 好的效果。 1)针对于路段集合S中第i条路段,其长度 在此说明,本文仅对输入特征数据进行量纲 为l,位置Pg与其起点和终点的距离分别为 统一处理,对于预测结果,本文使用单位时间内 d-ai、d-ed,距离采用欧几里德距离公式计算,则 事故发生的次数并没有映射到区间0,],这也与 可得路段差值d,=d-tsmi+d-end-ho 已有算法的交通事故风险描述一致。 2)寻找路段m使得dm为所有路段差值的最 2交通事故预测深度学习模型 小值。 3)定义阈值8,若dm小于阈值8,则该位置与 本节首先详细地描述了基于路网的交通事故 路段m绑定;若dm不小于阈值ε,则该位置与预测 风险预测模型(traffic accidents risk prediction based 集合中的任何路段都不绑定。 on road network,TARPBRN)的总体架构,然后分 根据以上位置点与路段的绑定算法,可以将 别对每个主要模块进行了具体介绍。 交通事故、微波检测器及出租车位置信息绑定到 2.1 TARPBRN模型架构 相应路段。从而可得路段在预测交通事故时的所 由1.2节可知,本文将交通事故的诱发因素 有属性特征。本文将路段属性数据分为3类:空 从数据特征出发主要分为三大类:时间相关特 间相关数据、时间相关数据、时空相关数据。 征、空间相关特征和时空相关特征,针对每一类 空间相关数据仅与路段相关的特征,对于 特征,分别采用不同的网络结构进行特征提取。 任意时间段数据值都一样。该类数据有路段长 TARPBRN模型的总体架构如图1所示。首先, 度、道路等级、车道数、道路所属区域等。 对3类属性数据进行特征提取操作。对于空间相 时间相关数据仅与时间段相关联的数据, 关数据,本文使用多层GCNN来提取空间特征。 对于所有的路段数据值都一样。该类特征有天 对于时间相关数据采用DLSTM提取时间特征。 气、风力、风向、气温等。 对于时空相关数据,本文将GCNN和DLSTM相 时空相关数据是与时间段、路段都有关联 结合来提取时空特征。然后,将3类属性数据通 的数据。同一路段在不同时间、不同路段在相同 过相应特征提取层获得的特征传入特征融合层, 时间都具有不同的数据值。该类数据有单位时间 将3类属性特征融合为一个整体。最后,将融合 道路通过车辆数、单位时间道路车辆通过平均速 后的特征传入全连接网络,通过全连接网络输出 度、单位时间内事故发生数量等。 最终的预测结果。 空间相关数据 多层GCNN层 时间相关数据 征融合层 全 DLSTM 接层 结果 时空相关特征 GCNN+DLSTM 图1交通事故风险预测框架 Fig.1 Traffic accident risk prediction framework 2.2多层GCNN层提取空间属性特征 法,在对图进行卷积神经网络学习时,可以同时 GCNN是一种能对图数据进行深度学习的方 考虑到节点的特征信息以及结构信息。这使得1.2 数据预处理 P(lng,lat) 本文提出的基于路网结构的城市交通事故短 期风险预测算法以真实路段作为空间预测单元, 因此使用的所有属性特征应该按照路段进行划 分。由 2.1 节可知,所有数据的位置信息以经纬 度来描述,因此首先要将经纬度所代表信息绑定 到相应路段。假设预测路段集合为 S,待绑定的 位置为 ,位置与路段绑定的算法如下。 i li P(lng,lat) di−start di−end di = di−start +di−end −li 1) 针对于路段集合 S 中第 条路段,其长度 为 ,位置 与其起点和终点的距离分别为 、 ,距离采用欧几里德距离公式计算,则 可得路段差值 。 2) 寻找路段 m 使得 dm 为所有路段差值的最 小值。 ε dm ε dm ε 3) 定义阈值 ,若 小于阈值 ,则该位置与 路段 m 绑定;若 不小于阈值 ,则该位置与预测 集合中的任何路段都不绑定。 根据以上位置点与路段的绑定算法,可以将 交通事故、微波检测器及出租车位置信息绑定到 相应路段。从而可得路段在预测交通事故时的所 有属性特征。本文将路段属性数据分为 3 类:空 间相关数据、时间相关数据、时空相关数据。 空间相关数据 仅与路段相关的特征,对于 任意时间段数据值都一样。该类数据有路段长 度、道路等级、车道数、道路所属区域等。 时间相关数据 仅与时间段相关联的数据, 对于所有的路段数据值都一样。该类特征有天 气、风力、风向、气温等。 时空相关数据 是与时间段、路段都有关联 的数据。同一路段在不同时间、不同路段在相同 时间都具有不同的数据值。该类数据有单位时间 道路通过车辆数、单位时间道路车辆通过平均速 度、单位时间内事故发生数量等。 [0,1] [0,1] 观察数据可知,以上数据数值范围都不统一, 因此并不能直接作为神经网络的输入。因此针对 于所有的枚举类特征,例如天气、风向、道路所属 区域等,本文采用 one-hot 编码。对于所有的数值 型特征,本文统计最大值、最小值,然后根据最大 最小值将其映射到区间 。于是所有的特征值 都处在 区间内,使得深度学习框架能获得良 好的效果。 [0,1] 在此说明,本文仅对输入特征数据进行量纲 统一处理,对于预测结果,本文使用单位时间内 事故发生的次数并没有映射到区间 ,这也与 已有算法的交通事故风险描述一致。 2 交通事故预测深度学习模型 本节首先详细地描述了基于路网的交通事故 风险预测模型 (traffic accidents risk prediction based on road network, TARPBRN) 的总体架构,然后分 别对每个主要模块进行了具体介绍。 2.1 TARPBRN 模型架构 由 1.2 节可知,本文将交通事故的诱发因素 从数据特征出发主要分为三大类:时间相关特 征、空间相关特征和时空相关特征,针对每一类 特征,分别采用不同的网络结构进行特征提取。 TARPBRN 模型的总体架构如图 1 所示。首先, 对 3 类属性数据进行特征提取操作。对于空间相 关数据,本文使用多层 GCNN 来提取空间特征。 对于时间相关数据采用 DLSTM 提取时间特征。 对于时空相关数据,本文将 GCNN 和 DLSTM 相 结合来提取时空特征。然后,将 3 类属性数据通 过相应特征提取层获得的特征传入特征融合层, 将 3 类属性特征融合为一个整体。最后,将融合 后的特征传入全连接网络,通过全连接网络输出 最终的预测结果。 空间相关数据 时间相关数据 时空相关特征 多层 GCNN 层 DLSTM GCNN+DLSTM 特征融合层 全连接层 预测 结果 图 1 交通事故风险预测框架 Fig. 1 Traffic accident risk prediction framework 2.2 多层 GCNN 层提取空间属性特征 GCNN 是一种能对图数据进行深度学习的方 法,在对图进行卷积神经网络学习时,可以同时 考虑到节点的特征信息以及结构信息。这使得 ·666· 智 能 系 统 学 报 第 15 卷