正在加载图片...
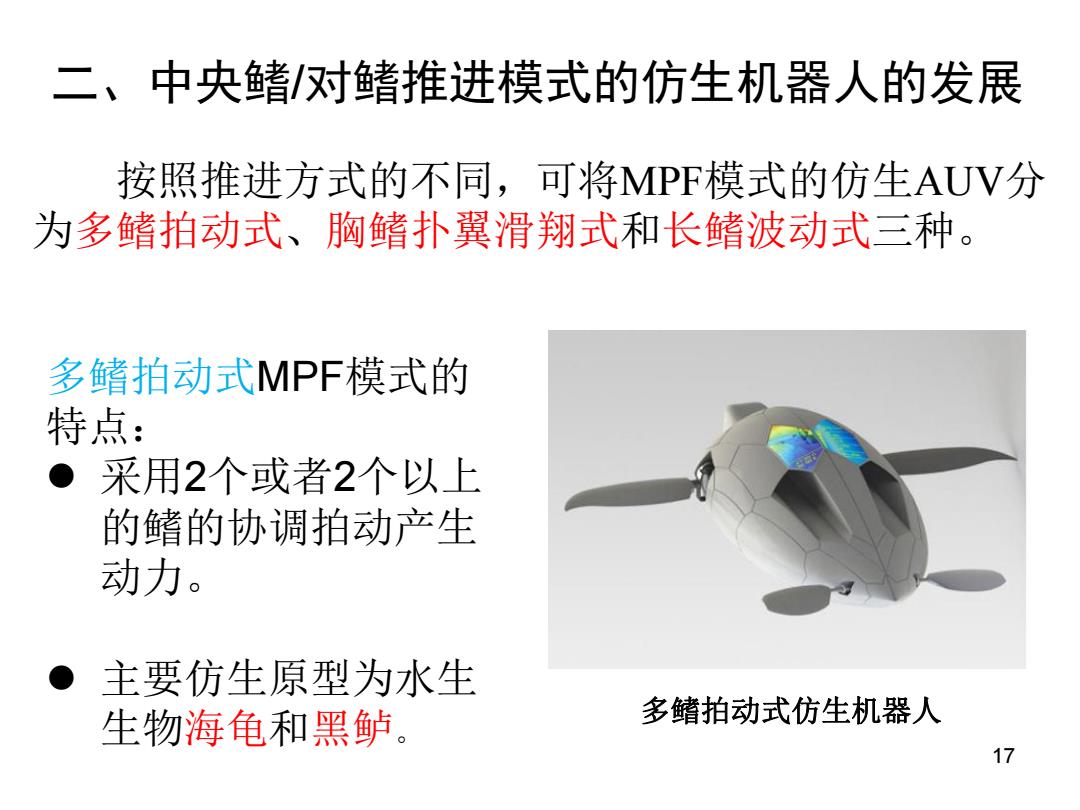
二、中央鳍/对鳍推进模式的仿生机器人的发展 按照推进方式的不同,可将MPF模式的仿生AUV分 为多鳍拍动式、胸鳍扑翼滑翔式和长鳍波动式三种。 多鳍拍动式MPF模式的 特点: 采用2个或者2个以上 的鳍的协调拍动产生 动力。 主要仿生原型为水生 生物海龟和黑鲈。 多鳍拍动式仿生机器人 17二、中央鳍/对鳍推进模式的仿生机器人的发展 17 按照推进方式的不同,可将MPF模式的仿生AUV分 为多鳍拍动式、胸鳍扑翼滑翔式和长鳍波动式三种。 多鳍拍动式仿生机器人 多鳍拍动式MPF模式的 特点: l 采用2个或者2个以上 的鳍的协调拍动产生 动力。 l 主要仿生原型为水生 生物海龟和黑鲈