正在加载图片...
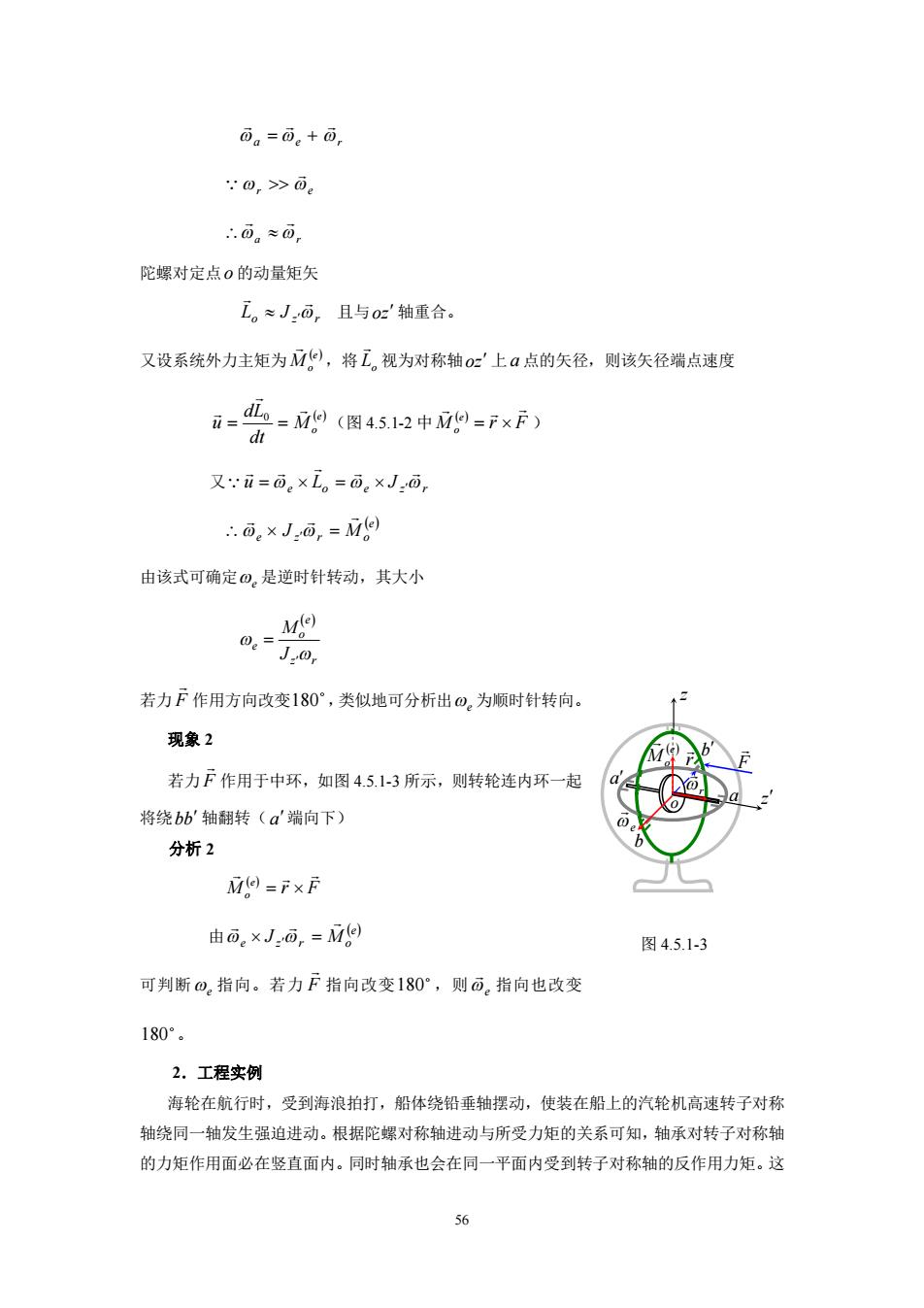
可。=而。+0, 0,>0e ∴0n≈0n 陀螺对定点0的动量矩矢 。≈J0,且与02轴重合。 又设系统外力主矩为M,,将工,视为对称轴o2'上a点的矢径,则该矢径端点速度 i=d机=(图451-2中M9=F×F) 又i=可。×L。=而。×J,而, a。xJ,o,=e) 由该式可确定⊙。是逆时针转动,其大小 0。= J0, 若力F作用方向改变180°,类似地可分析出0。为顺时针转向。 现象2 若力F作用于中环,如图4.5.1-3所示,则转轮连内环一起 将绕bb'轴翻转(a'端向下) 分析2 ,@=F×F 由o。×J,o,=M0 图4.5.1-3 可判断⊙。指向。若力F指向改变180°,则可。指向也改变 180°。 2.工程实例 海轮在航行时,受到海浪拍打,船体绕铅垂轴摆动,使装在船上的汽轮机高速转子对称 轴绕同一轴发生强迫进动。根据陀螺对称轴进动与所受力矩的关系可知,轴承对转子对称轴 的力矩作用面必在竖直面内。同时轴承也会在同一平面内受到转子对称轴的反作用力矩。这 5656 a e r r e a r 陀螺对定点o 的动量矩矢 o z r L J 且与oz 轴重合。 又设系统外力主矩为 e M o ,将 Lo 视为对称轴oz 上 a 点的矢径,则该矢径端点速度 e Mo dt dL u 0 (图 4.5.1-2 中 e M o r F ) 又 e o e z r u L J e e z r M o J 由该式可确定e 是逆时针转动,其大小 e o e z r M J 若力 F 作用方向改变 180 ,类似地可分析出e 为顺时针转向。 现象 2 若力 F 作用于中环,如图 4.5.1-3 所示,则转轮连内环一起 将绕bb 轴翻转(a端向下) 分析 2 M r F e o 由 e e z r M o J 可判断e 指向。若力 F 指向改变 180 ,则e 指向也改变 180 。 2.工程实例 海轮在航行时,受到海浪拍打,船体绕铅垂轴摆动,使装在船上的汽轮机高速转子对称 轴绕同一轴发生强迫进动。根据陀螺对称轴进动与所受力矩的关系可知,轴承对转子对称轴 的力矩作用面必在竖直面内。同时轴承也会在同一平面内受到转子对称轴的反作用力矩。这 图 4.5.1-3 r b z b a a e e Mo F r z o