正在加载图片...
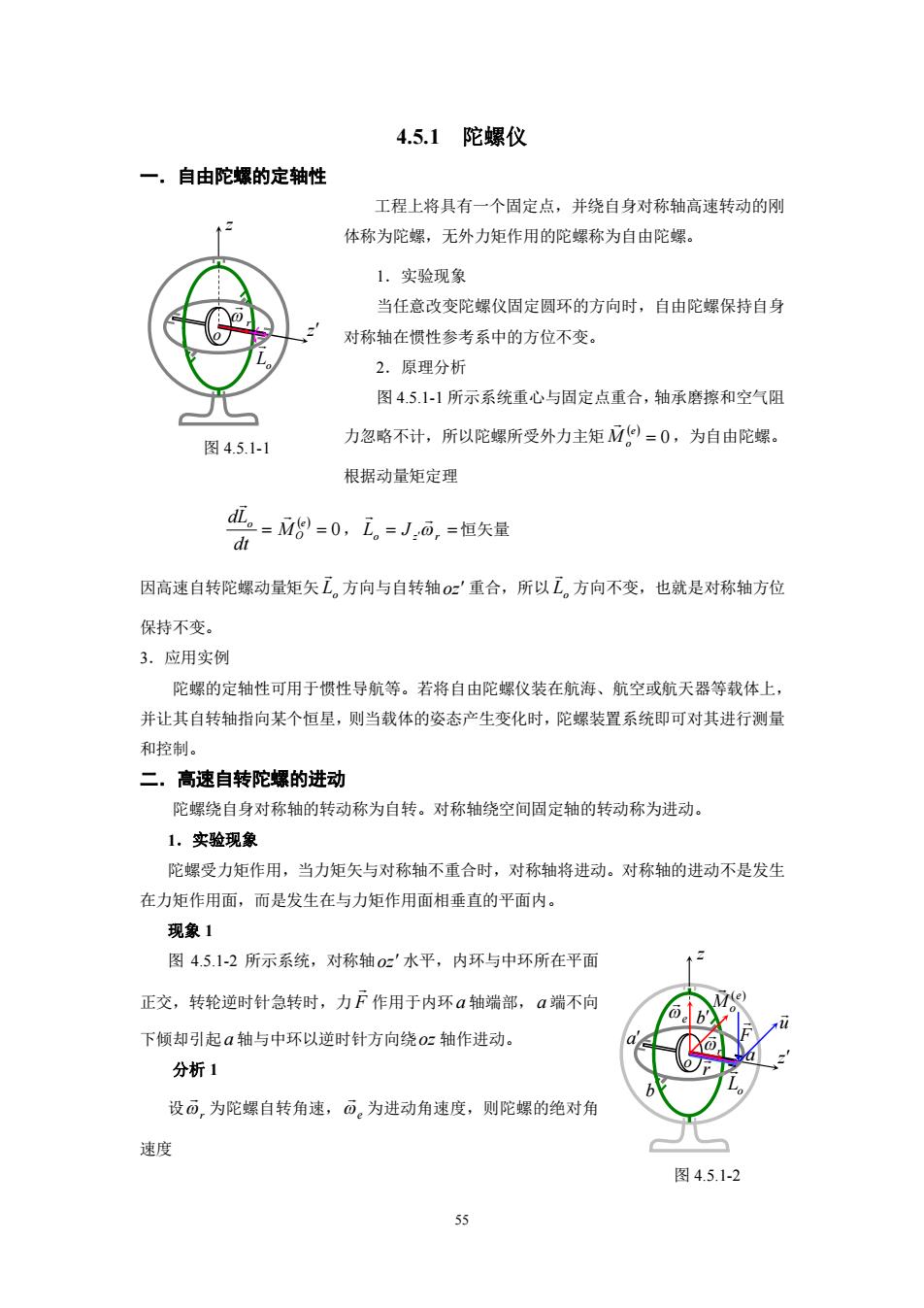
4.5.1 陀螺仪 一.自由陀螺的定轴性 工程上将具有一个固定点,并绕自身对称轴高速转动的刚 体称为陀螺,无外力矩作用的陀螺称为自由陀螺。 1.实验现象 当任意改变陀螺仪固定圆环的方向时,自由陀螺保持自身 对称轴在惯性参考系中的方位不变。 2.原理分析 图4.5.1-1所示系统重心与固定点重合,轴承磨擦和空气阻 力忽略不计,所以陀螺所受外力主矩M©)=0,为自由陀螺。 图4.5.1-1 根据动量矩定理 =8=0,i。=J0,=恒矢量 d 因高速自转陀螺动量矩矢工方向与自转轴oz'重合,所以工,方向不变,也就是对称轴方位 保持不变。 3.应用实例 陀螺的定轴性可用于惯性导航等。若将自由陀螺仪装在航海、航空或航天器等载体上, 并让其自转轴指向某个恒星,则当载体的姿态产生变化时,陀螺装置系统即可对其进行测量 和控制。 二.高速自转陀螺的进动 陀螺绕自身对称轴的转动称为自转。对称轴绕空间固定轴的转动称为进动。 1.实验现象 陀螺受力矩作用,当力矩矢与对称轴不重合时,对称轴将进动。对称轴的进动不是发生 在力矩作用面,而是发生在与力矩作用面相垂直的平面内。 现象1 图4.5.1-2所示系统,对称轴oz'水平,内环与中环所在平面 正交,转轮逆时针急转时,力F作用于内环a轴端部,α端不向 下倾却引起α轴与中环以逆时针方向绕oz轴作进动。 分析1 设o,为陀螺自转角速,o。为进动角速度,则陀螺的绝对角 速度 图4.5.1-2 5555 4.5.1 陀螺仪 一.自由陀螺的定轴性 工程上将具有一个固定点,并绕自身对称轴高速转动的刚 体称为陀螺,无外力矩作用的陀螺称为自由陀螺。 1.实验现象 当任意改变陀螺仪固定圆环的方向时,自由陀螺保持自身 对称轴在惯性参考系中的方位不变。 2.原理分析 图 4.5.1-1 所示系统重心与固定点重合,轴承磨擦和空气阻 力忽略不计,所以陀螺所受外力主矩 e M o 0,为自由陀螺。 根据动量矩定理 e O o M dt dL 0, Lo J z r 恒矢量 因高速自转陀螺动量矩矢 Lo 方向与自转轴oz 重合,所以 Lo 方向不变,也就是对称轴方位 保持不变。 3.应用实例 陀螺的定轴性可用于惯性导航等。若将自由陀螺仪装在航海、航空或航天器等载体上, 并让其自转轴指向某个恒星,则当载体的姿态产生变化时,陀螺装置系统即可对其进行测量 和控制。 二.高速自转陀螺的进动 陀螺绕自身对称轴的转动称为自转。对称轴绕空间固定轴的转动称为进动。 1.实验现象 陀螺受力矩作用,当力矩矢与对称轴不重合时,对称轴将进动。对称轴的进动不是发生 在力矩作用面,而是发生在与力矩作用面相垂直的平面内。 现象 1 图 4.5.1-2 所示系统,对称轴oz 水平,内环与中环所在平面 正交,转轮逆时针急转时,力 F 作用于内环a 轴端部,a 端不向 下倾却引起a 轴与中环以逆时针方向绕oz 轴作进动。 分析 1 设r 为陀螺自转角速,e 为进动角速度,则陀螺的绝对角 速度 z r Lo z o 图 4.5.1-1 z b b a a u e F r Lo r z o 图 4.5.1-2 ( ) e Mo