正在加载图片...
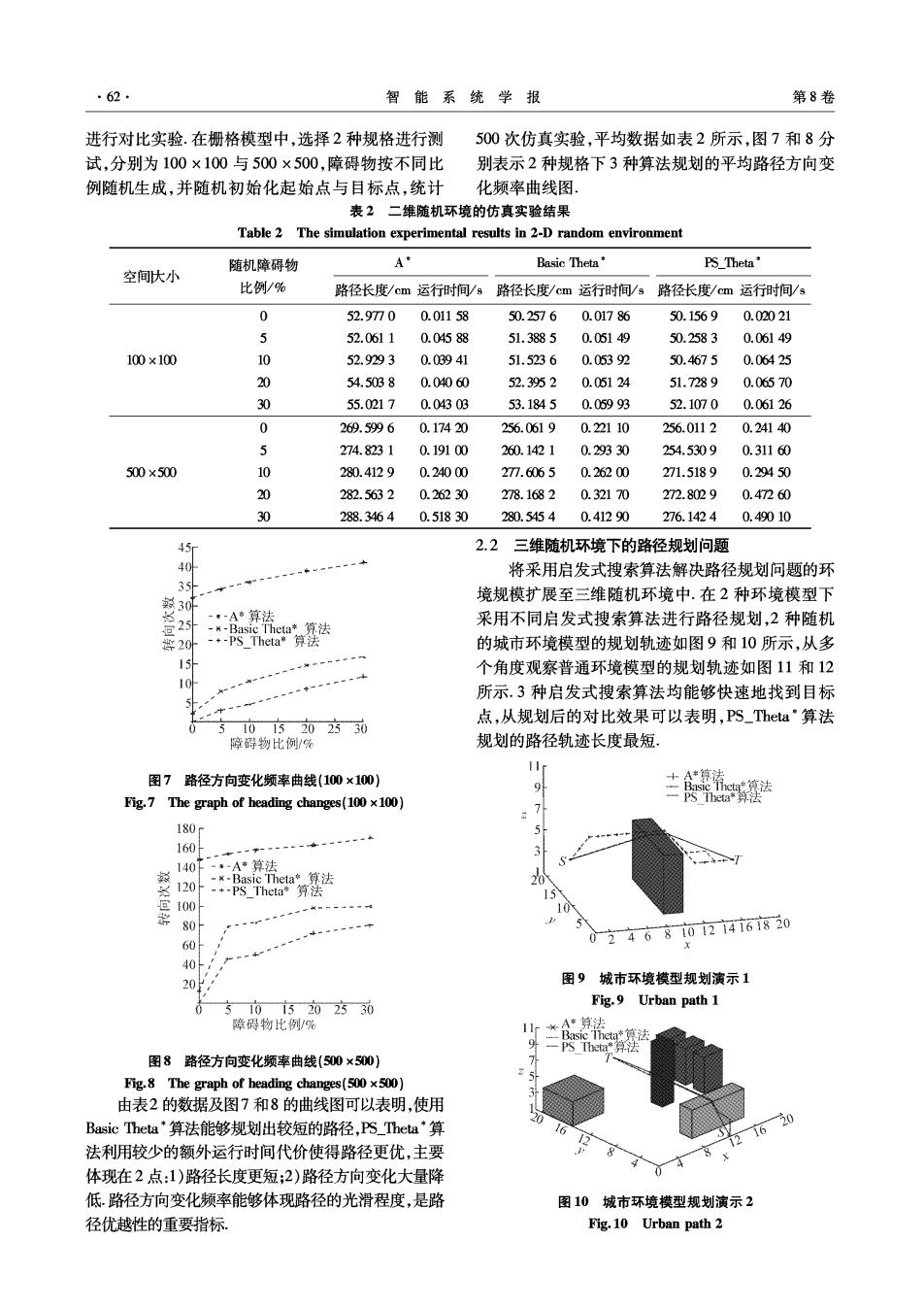
·62 智能系统学报 第8卷 进行对比实验.在栅格模型中,选择2种规格进行测 500次仿真实验,平均数据如表2所示,图7和8分 试,分别为100×100与500×500,障碍物按不同比 别表示2种规格下3种算法规划的平均路径方向变 例随机生成,并随机初始化起始点与目标点,统计 化频率曲线图, 表2二维随机环境的仿真实验结果 Table 2 The simulation experimental results in 2-D random environment 随机障碍物 A Basic Theta' PS Theta 空间大小 比例/% 路径长度/cm运行时间/s路径长度/cm运行时间/s路径长度/cm运行时间/s 0 52.970 0.01158 50.2576 0.01786 50.1569 0.02021 与 52.0611 0.04588 51.3885 0.05149 50.2583 0.06149 100×100 10 52.9293 0.03941 51.5236 0.05392 50.4675 0.06425 20 54.5038 0.04060 52.3952 0.05124 51.7289 0.06570 30 55.0217 0.04303 53.1845 0.05993 52.1070 0.06126 0 269.5996 0.17420 256.06190.22110 256.0112 0.24140 5 274.8231 0.19100 260.1421 0.29330 254.5309 0.31160 500×500 10 280.4129 0.24000 27.6065 0.26200 271.5189 0.29450 20 282.5632 0.26230 278.1682 0.32170 272.8029 0.47260 30 288.3464 0.51830 280.5454 0.41290 276.1424 0.49010 45m 2.2 三维随机环境下的路径规划问题 40H 将采用启发式搜索算法解决路径规划问题的环 35 30 境规模扩展至三维随机环境中.在2种环境模型下 2 --A多算法 采用不同启发式搜索算法进行路径规划,2种随机 -¥-Basic Theta*算法 20 -+-PS Theta* 算法 的城市环境模型的规划轨迹如图9和10所示,从多 个角度观察普通环境模型的规划轨迹如图11和12 以 所示.3种启发式搜索算法均能够快速地找到目标 点,从规划后的对比效果可以表明,PS_Theta·算法 1015202530 障碍物比例/% 规划的路径轨迹长度最短: 图7路径方向变化频率曲线(100×100) 9 het*法 Ffig.7 The graph of heading changes(100×100】 180 160 140下-·A*算法 -x-Basic Thetat*算法 120 -*-PS_Theta算法 5 100 10 群 80 60 0246810121416820 40 20 图9城市环境模型规划演示1 0 51015202530 Fig.9 Urban path 1 障碍物比例/% 11r 光A*算法 Basic Theta*算法 一PS Theta*算法 图8路径方向变化频率曲线(500×500) Fig.8 The graph of heading changes(500 x500) 由表2的数据及图7和8的曲线图可以表明,使用 Basic Theta算法能够规划出较短的路径,PS_Theta*算 20 16 法利用较少的额外运行时间代价使得路径更优,主要 体现在2点:1)路径长度更短;2)路径方向变化大量降 低.路径方向变化频率能够体现路径的光滑程度,是路 图10城市环境模型规划演示2 径优越性的重要指标。 Fig.10 Urban path 2