正在加载图片...
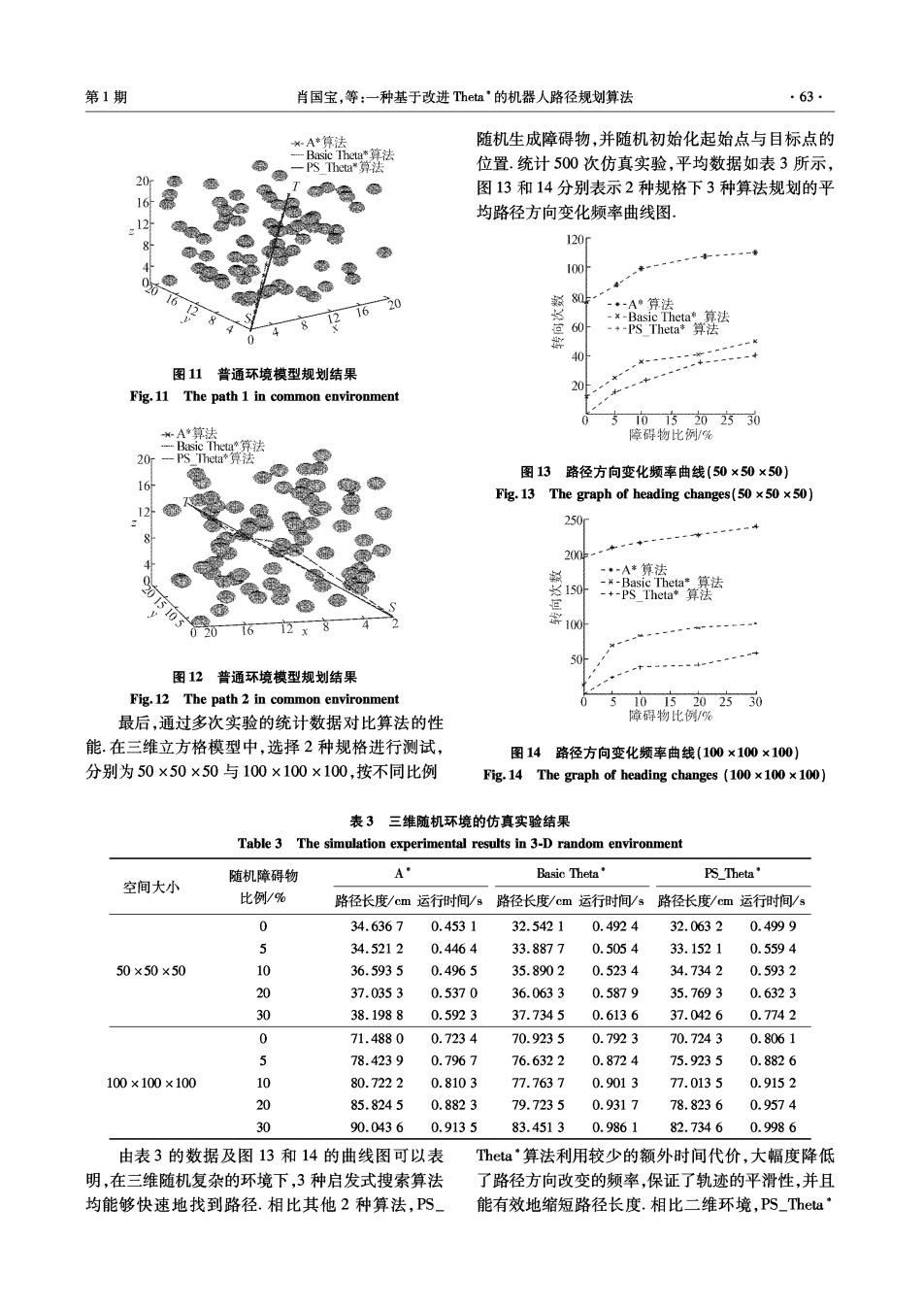
第1期 肖国宝,等:一种基于改进Theta'的机器人路径规划算法 63 A*算法 随机生成障碍物,并随机初始化起始点与目标点的 Basic Theta*算法 PS Theta算法 位置.统计500次仿真实验,平均数据如表3所示, 20 图13和14分别表示2种规格下3种算法规划的平 16 脸 ÷12 均路径方向变化频率曲线图 120 100 00 6 16 20 茶80 --A·算法 -×-Basic Theta算法 4 4 812 过 60 -+-PS Theta*算法 0 0 图11普通环境模型规划结果 20 Fig.11 The path 1 in common environment 0 方07内202方30 A算法 障碍物比例/% Basic Theta*算法 20 -PS Theta*算法 静 图13路径方向变化频率曲线(50×50×50)】 6 Fig.13 The graph of heading changes(50 x50 x50) 250 200 ·-A*算法 岁150 -×-Basic Theta*算法 -+-PS Theta*算法 62x8 50 图12。普通环境模型规划结果 Fig.12 The path 2 in common environment 0 1015202530 最后,通过多次实验的统计数据对比算法的性 障碍物比例/% 能.在三维立方格模型中,选择2种规格进行测试, 图14路径方向变化频率曲线(100×100×100)】 分别为50×50×50与100×100×100,按不同比例 Fig.14 The graph of heading changes (100 x100 x 100) 表3三维随机环境的仿真实验结果 Table 3 The simulation experimental results in 3-D random environment 随机障碍物 Basic Theta' PS Theta" 空间大小 比例/% 路径长度/cm运行时间/s路径长度/cm运行时间/s路径长度/cm运行时间/s 0 34.6367 0.4531 32.5421 0.4924 32.0632 0.4999 J 34.5212 0.4464 33.8877 0.5054 33.1521 0.5594 50×50×50 10 36.5935 0.4965 35.8902 0.5234 34.7342 0.5932 20 37.0353 0.5370 36.0633 0.5879 35.7693 0.6323 30 38.1988 0.5923 37.7345 0.6136 37.0426 0.7742 0 71.4880 0.7234 70.9235 0.7923 70.7243 0.8061 78.4239 0.7967 76.6322 0.8724 75.9235 0.8826 100×100×100 10 80.7222 0.8103 77.7637 0.9013 77.0135 0.9152 20 85.8245 0.8823 79.7235 0.9317 78.8236 0.9574 30 90.04360.9135 83.45130.9861 82.73460.9986 由表3的数据及图13和14的曲线图可以表 Theta'算法利用较少的额外时间代价,大幅度降低 明,在三维随机复杂的环境下,3种启发式搜索算法 了路径方向改变的频率,保证了轨迹的平滑性,并且 均能够快速地找到路径.相比其他2种算法,PS_ 能有效地缩短路径长度.相比二维环境,PS_Thea