正在加载图片...
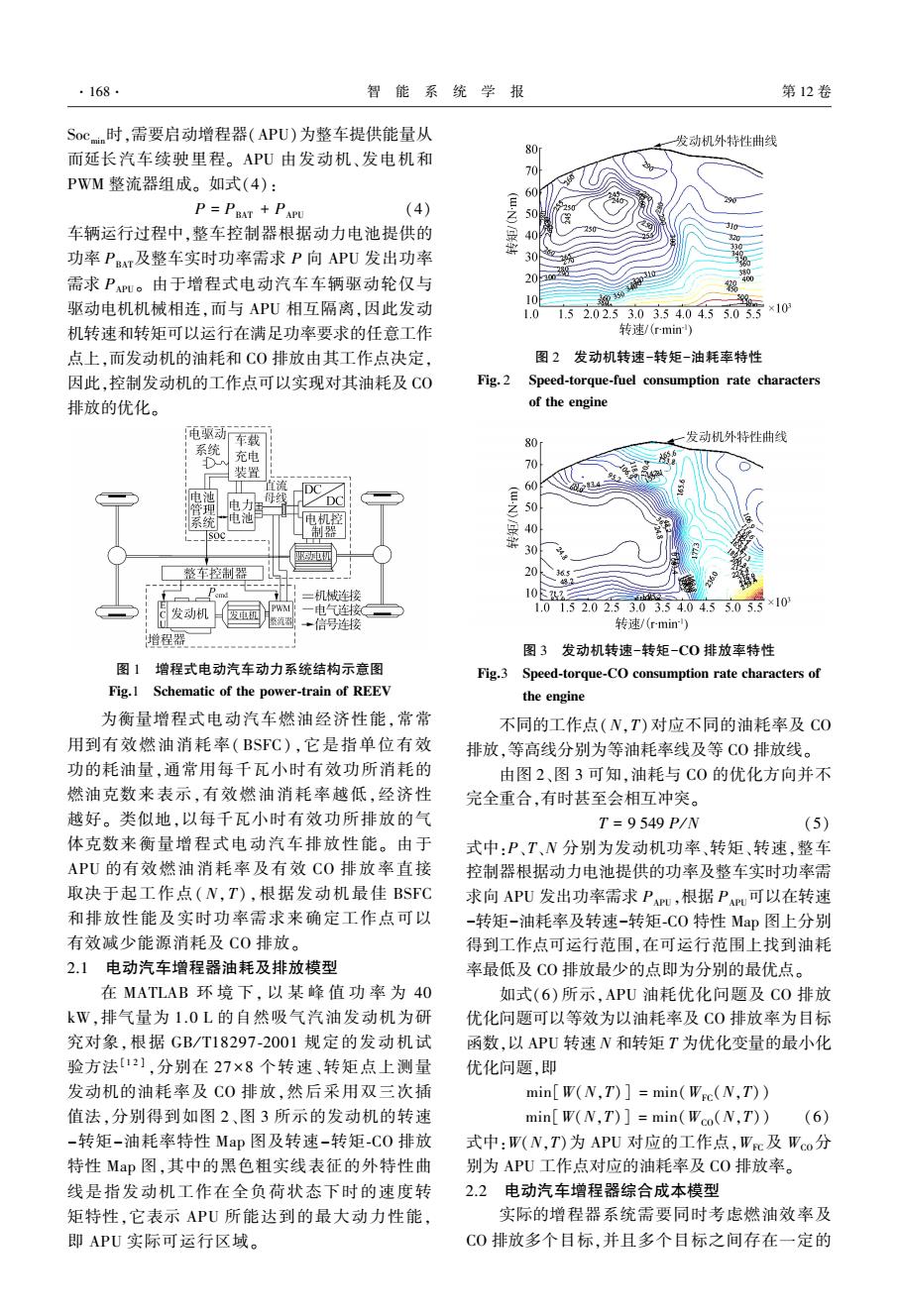
.168 智能系统学报 第12卷 Soc.时,需要启动增程器(APU)为整车提供能量从 发动机外特性曲线 而延长汽车续驶里程。APU由发动机、发电机和 PWM整流器组成。如式(4): P=PBAT PAPU (4) 车辆运行过程中,整车控制器根据动力电池提供的 40 功率PAT及整车实时功率需求P向APU发出功率 需求Pu。由于增程式电动汽车车辆驱动轮仅与 20 器 10 驱动电机机械相连,而与APU相互隔离,因此发动 8g 0 1.52.02.53.03.54.0455.05.5×10 机转速和转矩可以运行在满足功率要求的任意工作 转速/(rmin) 点上,而发动机的油耗和CO排放由其工作点决定, 图2发动机转速-转矩-油耗率特性 因此,控制发动机的工作点可以实现对其油耗及C0 Fig.2 Speed-torque-fuel consumption rate characters 排放的优化。 of the engine 龟驱动车载 一发动机外特性曲线 系统 80 Dn 充电 装置 70 电池 DC 60 电力 DC 50 系价 电池 电机 制器 40 电 30 整车控制器 20 =机械连接 103 C发动机 发电机 一电气连接 1.01.52.02.53.035404550535×10 整流 ·信号连接 转速/(rmin) 增程器 图3发动机转速-转矩-C0排放率特性 图1增程式电动汽车动力系统结构示意图 Fig.3 Speed-torque-CO consumption rate characters of Fig.1 Schematic of the power-train of REEV the engine 为衡量增程式电动汽车燃油经济性能,常常 不同的工作点(N,T)对应不同的油耗率及CO 用到有效燃油消耗率(B$FC),它是指单位有效 排放,等高线分别为等油耗率线及等C0排放线。 功的耗油量,通常用每千瓦小时有效功所消耗的 由图2、图3可知,油耗与C0的优化方向并不 燃油克数来表示,有效燃油消耗率越低,经济性 完全重合,有时甚至会相互冲突。 越好。类似地,以每千瓦小时有效功所排放的气 T=9549P/W (5) 体克数来衡量增程式电动汽车排放性能。由于 式中:P、T、N分别为发动机功率、转矩、转速,整车 APU的有效燃油消耗率及有效CO排放率直接 控制器根据动力电池提供的功率及整车实时功率需 取决于起工作点(N,T),根据发动机最佳BSFC 求向APU发出功率需求PAu,根据PA可以在转速 和排放性能及实时功率需求来确定工作点可以 -转矩-油耗率及转速-转矩-C0特性Map图上分别 有效减少能源消耗及C0排放。 得到工作点可运行范围,在可运行范围上找到油耗 2.1电动汽车增程器油耗及排放模型 率最低及C0排放最少的点即为分别的最优点。 在MATLAB环境下,以某峰值功率为40 如式(6)所示,APU油耗优化问题及C0排放 kW,排气量为1.0L的自然吸气汽油发动机为研 优化问题可以等效为以油耗率及C0排放率为目标 究对象,根据GB/T18297-2001规定的发动机试 函数,以APU转速N和转矩T为优化变量的最小化 验方法[12],分别在27×8个转速、转矩点上测量 优化问题,即 发动机的油耗率及C0排放,然后采用双三次插 min[W(N,T)]=min(Wec(N,T)) 值法,分别得到如图2、图3所示的发动机的转速 min[W(N,T)]min(Wco(N,T))(6) -转矩-油耗率特性Map图及转速-转矩-C0排放 式中:W(N,T)为APU对应的工作点,Wc及Wco分 特性Ma即图,其中的黑色粗实线表征的外特性曲 别为APU工作点对应的油耗率及CO排放率。 线是指发动机工作在全负荷状态下时的速度转 2.2电动汽车增程器综合成本模型 矩特性,它表示APU所能达到的最大动力性能, 实际的增程器系统需要同时考虑燃油效率及 即APU实际可运行区域。 C0排放多个目标,并且多个目标之间存在一定的Socmin时,需要启动增程器(APU)为整车提供能量从 而延长汽车续驶里程。 APU 由发动机、发电机和 PWM 整流器组成。 如式(4): P = PBAT + PAPU (4) 车辆运行过程中,整车控制器根据动力电池提供的 功率 PBAT及整车实时功率需求 P 向 APU 发出功率 需求 PAPU。 由于增程式电动汽车车辆驱动轮仅与 驱动电机机械相连,而与 APU 相互隔离,因此发动 机转速和转矩可以运行在满足功率要求的任意工作 点上,而发动机的油耗和 CO 排放由其工作点决定, 因此,控制发动机的工作点可以实现对其油耗及 CO 排放的优化。 图 1 增程式电动汽车动力系统结构示意图 Fig.1 Schematic of the power⁃train of REEV 为衡量增程式电动汽车燃油经济性能,常常 用到有效燃油消耗率( BSFC) ,它是指单位有效 功的耗油量,通常用每千瓦小时有效功所消耗的 燃油克数来表示,有效燃油消耗率越低,经济性 越好。 类似地,以每千瓦小时有效功所排放的气 体克数来衡量增程式电动汽车排放性能。 由于 APU 的有效燃油消耗率及有效 CO 排放率直接 取决于起工作点( N,T) ,根据发动机最佳 BSFC 和排放性能及实时功率需求来确定工作点可以 有效减少能源消耗及 CO 排放。 2.1 电动汽车增程器油耗及排放模型 在 MATLAB 环 境 下, 以 某 峰 值 功 率 为 40 kW,排气量为 1.0 L 的自然吸气汽油发动机为研 究对象,根据 GB / T18297⁃2001 规定的发动机试 验方法[ 1 2 ] ,分别在 27 × 8 个转速、转矩点上测量 发动机的油耗率及 CO 排放,然后采用双三次插 值法,分别得到如图 2、图 3 所示的发动机的转速 -转矩-油耗率特性 Map 图及转速-转矩⁃CO 排放 特性 Map 图,其中的黑色粗实线表征的外特性曲 线是指发动机工作在全负荷状态下时的速度转 矩特性,它表示 APU 所能达到的最大动力性能, 即 APU 实际可运行区域。 图 2 发动机转速-转矩-油耗率特性 Fig. 2 Speed⁃torque⁃fuel consumption rate characters of the engine 图 3 发动机转速-转矩-CO 排放率特性 Fig.3 Speed⁃torque⁃CO consumption rate characters of the engine 不同的工作点(N,T)对应不同的油耗率及 CO 排放,等高线分别为等油耗率线及等 CO 排放线。 由图 2、图 3 可知,油耗与 CO 的优化方向并不 完全重合,有时甚至会相互冲突。 T = 9 549 P / N (5) 式中:P、T、N 分别为发动机功率、转矩、转速,整车 控制器根据动力电池提供的功率及整车实时功率需 求向 APU 发出功率需求 PAPU,根据 PAPU可以在转速 -转矩-油耗率及转速-转矩⁃CO 特性 Map 图上分别 得到工作点可运行范围,在可运行范围上找到油耗 率最低及 CO 排放最少的点即为分别的最优点。 如式(6) 所示,APU 油耗优化问题及 CO 排放 优化问题可以等效为以油耗率及 CO 排放率为目标 函数,以 APU 转速 N 和转矩 T 为优化变量的最小化 优化问题,即 min[W(N,T)] = min(WFC(N,T)) min[W(N,T)] = min(WCO(N,T)) (6) 式中:W(N,T)为 APU 对应的工作点,WFC及 WCO分 别为 APU 工作点对应的油耗率及 CO 排放率。 2.2 电动汽车增程器综合成本模型 实际的增程器系统需要同时考虑燃油效率及 CO 排放多个目标,并且多个目标之间存在一定的 ·168· 智 能 系 统 学 报 第 12 卷