正在加载图片...
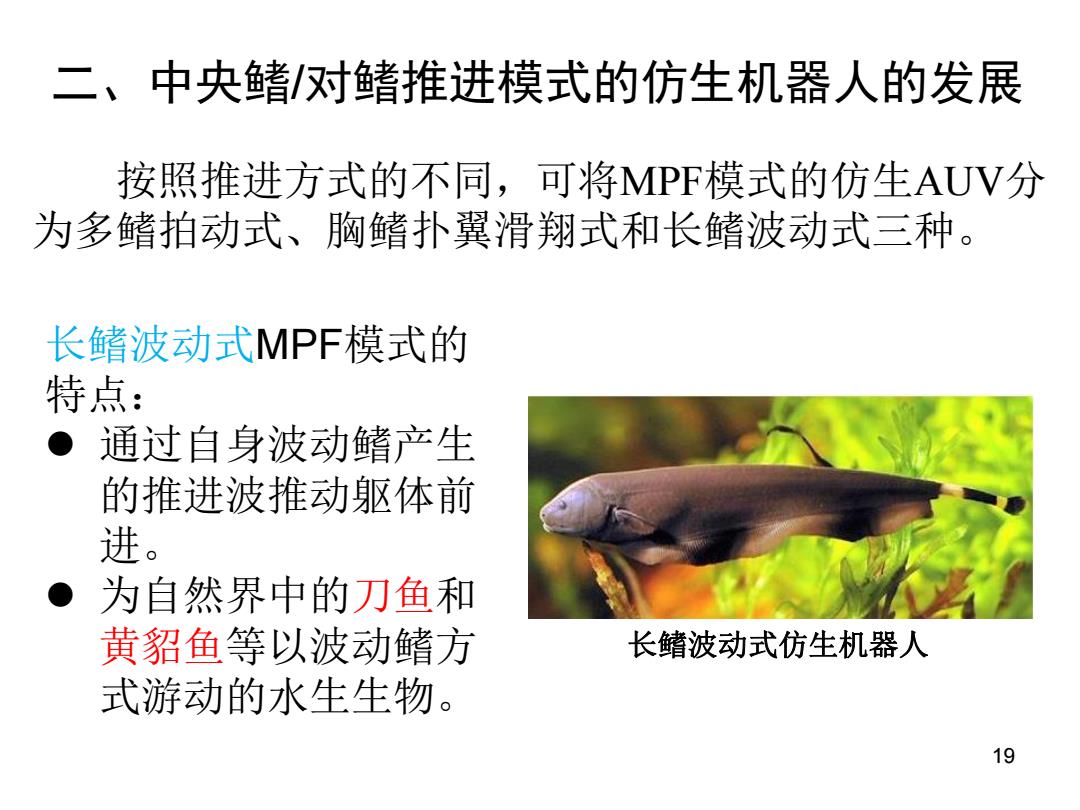
二、中央鳍/对鳍推进模式的仿生机器人的发展 按照推进方式的不同,可将MPF模式的仿生AUV分 为多鳍拍动式、胸鳍扑翼滑翔式和长鳍波动式三种。 长鳍波动式MPF模式的 特点: ● 通过自身波动鳍产生 的推进波推动躯体前 进。 为自然界中的刀鱼和 黄貂鱼等以波动鳍方 长鳍波动式仿生机器人 式游动的水生生物。 19二、中央鳍/对鳍推进模式的仿生机器人的发展 19 按照推进方式的不同,可将MPF模式的仿生AUV分 为多鳍拍动式、胸鳍扑翼滑翔式和长鳍波动式三种。 长鳍波动式MPF模式的 特点: l 通过自身波动鳍产生 的推进波推动躯体前 进。 l 为自然界中的刀鱼和 黄貂鱼等以波动鳍方 式游动的水生生物。 长鳍波动式仿生机器人