正在加载图片...
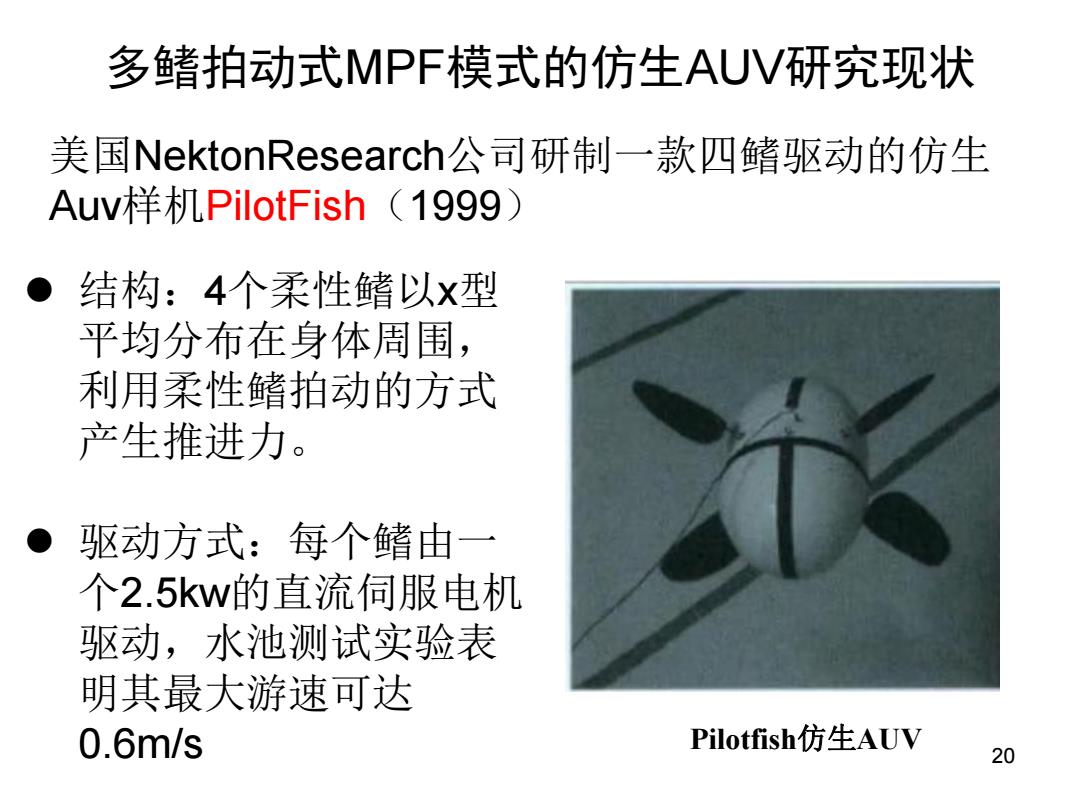
多鳍拍动式MPF模式的仿生AUV研究现状 美国NektonResearch公司研制一款四鳍驱动的仿生 Auv样机PilotFish(1999) 结构:4个柔性鳍以x型 平均分布在身体周围, 利用柔性鳍拍动的方式 产生推进力。 驱动方式:每个鳍由一 个2.5kw的直流伺服电机 驱动,水池测试实验表 明其最大游速可达 0.6m/s Pilotfish仿生AUV 20多鳍拍动式MPF模式的仿生AUV研究现状 20 Pilotfish仿生AUV 美国NektonResearch公司研制一款四鳍驱动的仿生 Auv样机PilotFish(1999) l 结构:4个柔性鳍以x型 平均分布在身体周围, 利用柔性鳍拍动的方式 产生推进力。 l 驱动方式:每个鳍由一 个2.5kw的直流伺服电机 驱动,水池测试实验表 明其最大游速可达 0.6m/s