正在加载图片...
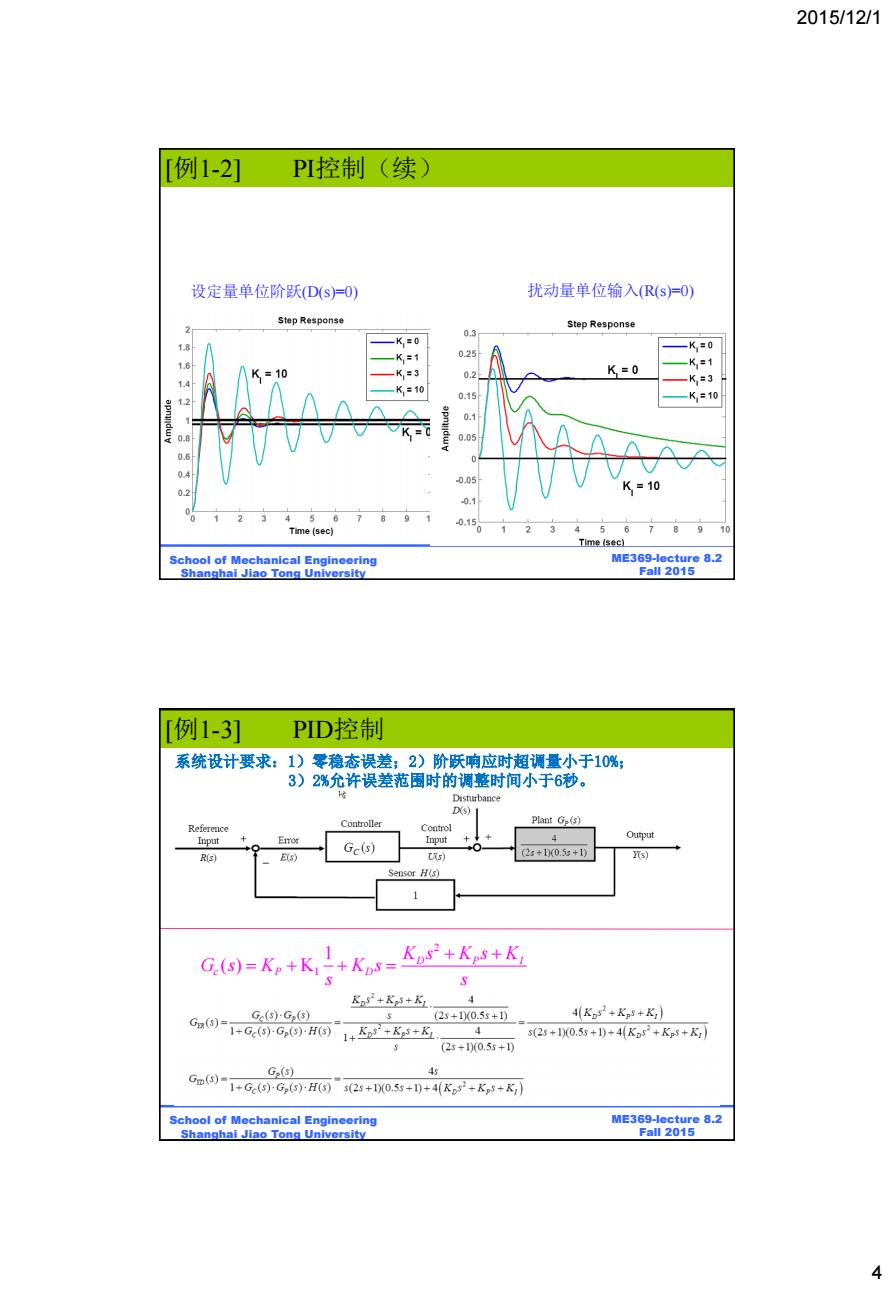
2015/12/1 T例1-21 PI控制(续) 设定量单位阶跃(D(s)=O) 扰动量单位输入(R(s)=O) Step Response Step Response 1.8 K=0 03 -K=0 K,=1 025 K=1 K=10 K=3 02 K=0 1.4 K,=3 K=10 12 K=10 0.8 0.6 0.05 0.2 K=10 0.1 015。 Time (sec) 5 6 Time (sec) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fal12015 例1-3] PID控制 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%; 3)2%允许误差范围时的调整时间小于6秒。 Disturbance D(s) Reference Comt山oller Control Plant Ge(s) Input Input 4 Output E(s) Gc(s) R(s) Us) (2s+10(0.5x+1) s Sensor H(s) 1 G(s)=Kp+K-+Kps= Kos2+Kps+K Kos+Ks+K1 4 Ge(s)-G(s) (2s+1)(0.5s+1) 4K2+Kn+K) G(S)= 1+Ce(6)G,(H⑤1++K5+&. 4 s(23+100.5s+1)+4Ks2+K3+K,) (25+100.55+1) G.(s) 4 6m0)1+G.)-G,9-HOs2s+X0.5s+)+4Ko+K,5+) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 42015/12/1 4 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 设定量单位阶跃(D(s)=0) 扰动量单位输入(R(s)=0) [例1-2] PI控制(续) BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University PID controller [例1-3] PID—控制example--PID 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%; 3)2%允许误差范围时的调整时间小于6秒。 2 I 1 ( ) K D P I c P D K s K s K G s K K s s s