正在加载图片...
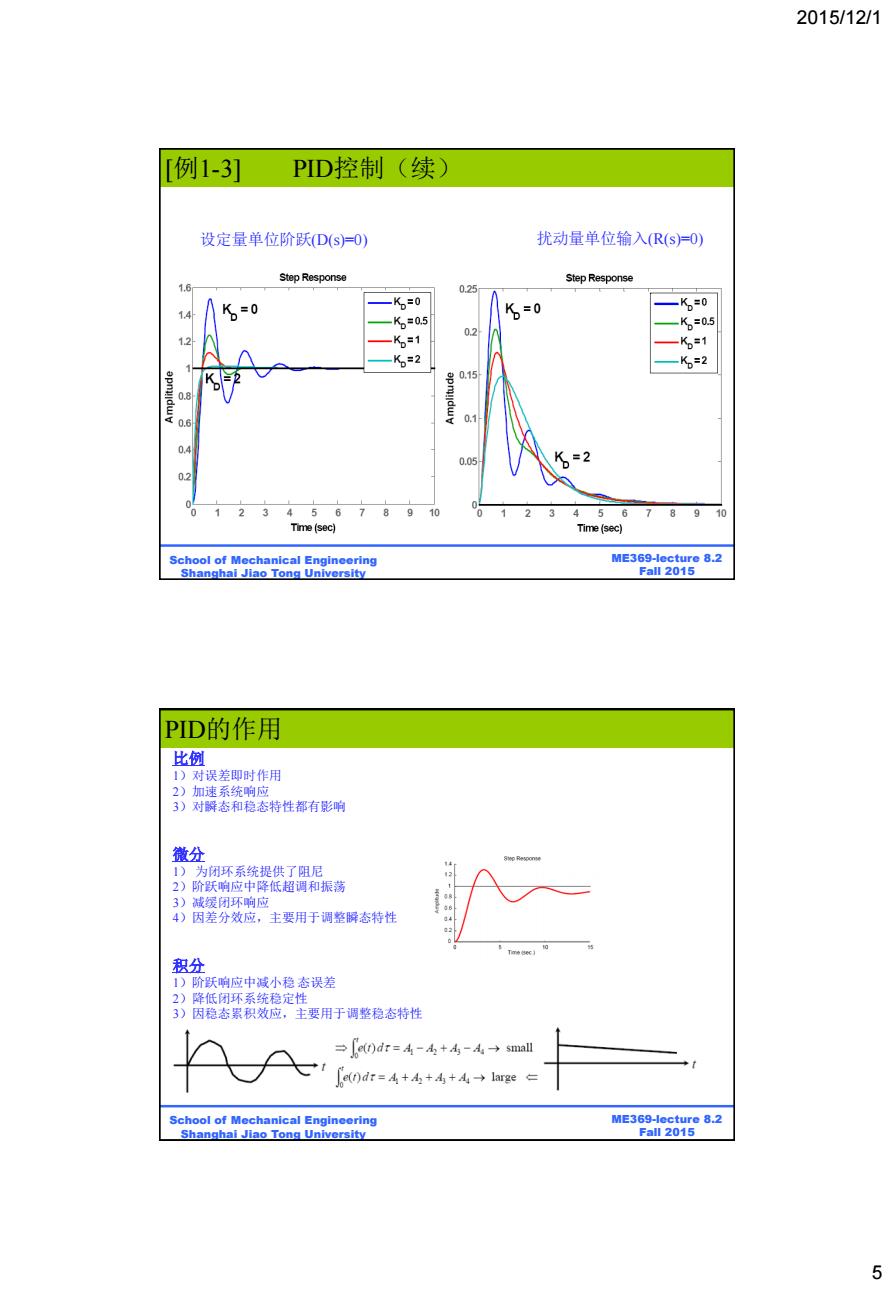
2015/12/1 T例1-3] PID控制(续) 设定量单位阶跃(D(s)=O) 扰动量单位输入(R(s)=O) Step Response Step Response 1.6 0.25 K=0 =0 0 K=0 K=0.5 K=0.5 0.2 12 X=1 K=2 K=2 0.15 0.6 0.4 0.05 K=2 0.2 0 123456 7 4 6 1 8 910 Time(sec) Time (sec) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fal12015 PID的作用 比例 」)对误差即时作用 2)加速系统响应 3)对瞬态和稳态特性都有影响 徽分 1)为闭环系统提供了阻尼 2)阶跃响应中降低超调和振荡 3)减缓闭环响应 4)因差分效应,主要用于调整瞬态特性 积分 1)阶跃响应中减小稳态误差 2)降低闭环系统稳定性 3)因稳态累积效应,主要用于调整稳态特性 台e0dr=4-4+4-A→smal e0dr=4+4+4+4→large School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 52015/12/1 5 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例1-3] PID控制(续) 设定量单位阶跃(D(s)=0) 扰动量单位输入(R(s)=0) BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University PID的作用 比例 1)对误差即时作用 2)加速系统响应 3)对瞬态和稳态特性都有影响 微分 1) 为闭环系统提供了阻尼 2)阶跃响应中降低超调和振荡 3)减缓闭环响应 4)因差分效应,主要用于调整瞬态特性 积分 1)阶跃响应中减小稳 态误差 2)降低闭环系统稳定性 3)因稳态累积效应,主要用于调整稳态特性