正在加载图片...
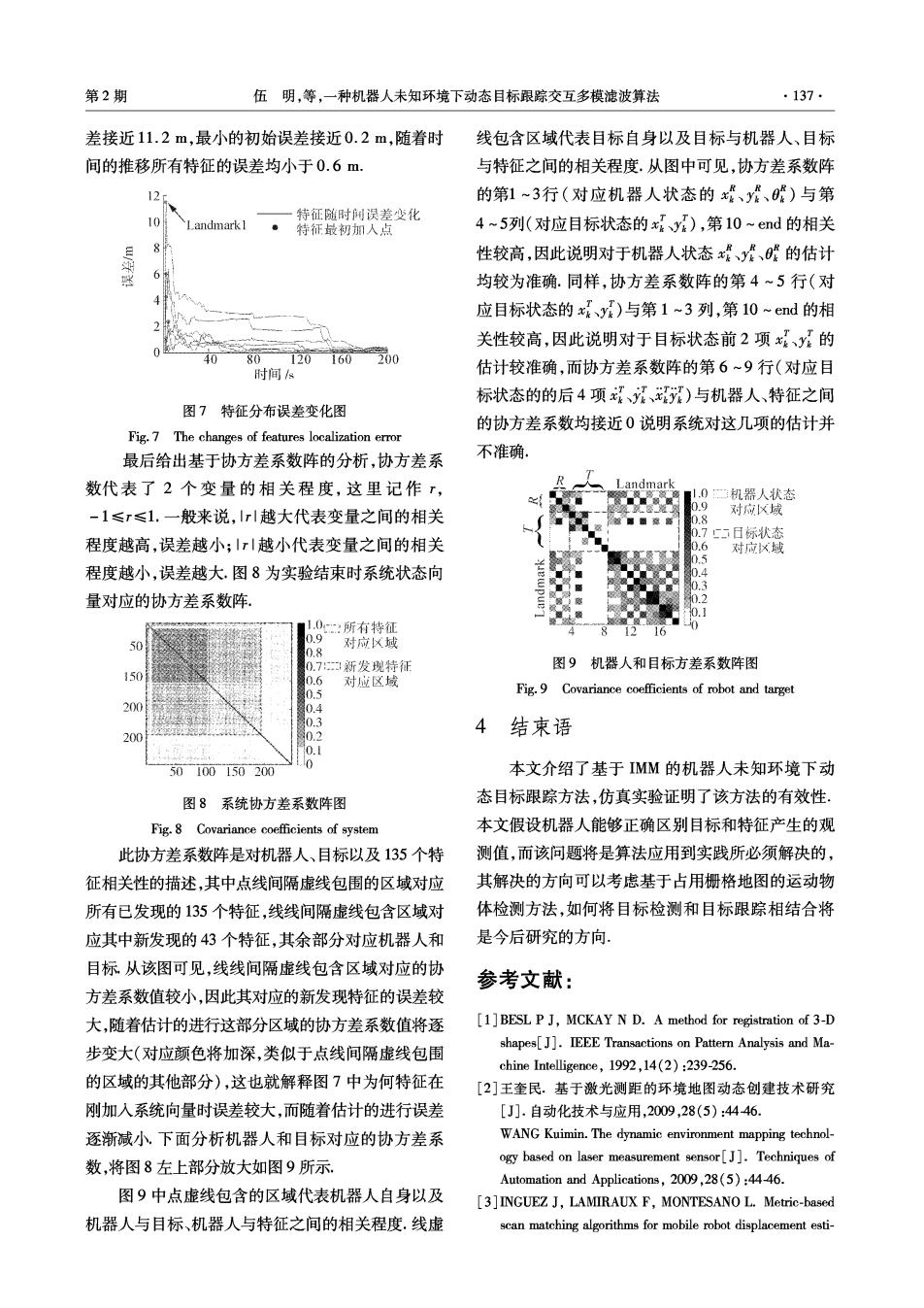
第2期 伍明,等,一种机器人未知环境下动态目标跟踪交互多模滤波算法 ·137· 差接近11.2m,最小的初始误差接近0.2m,随着时 线包含区域代表目标自身以及目标与机器人、目标 间的推移所有特征的误差均小于0.6m. 与特征之间的相关程度.从图中可见,协方差系数阵 12 的第1~3行(对应机器人状态的、y、)与第 10 特征随时间误差变化 LandmarkI 特征最初加人点 4~5列(对应目标状态的xy),第10~end的相关 8 性较高,因此说明对于机器人状态、y、的估计 均较为准确.同样,协方差系数阵的第4~5行(对 4 应目标状态的xy)与第1~3列,第10~end的相 o 关性较高,因此说明对于目标状态前2项x、y的 40 80 120 160200 时间/s 估计较准确,而协方差系数阵的第6~9行(对应目 标状态的的后4项、)与机器人、特征之间 图7特征分布误差变化图 的协方差系数均接近0说明系统对这几项的估计并 Fig.7 The changes of features localization error 最后给出基于协方差系数阵的分析,协方差系 不准确。 数代表了2个变量的相关程度,这里记作ī, andmark 1.0机器人状态 0.9 -1≤r≤1,一般来说,lr越大代表变量之间的相关 对应区域 0.8 0.7上日标状态 程度越高,误差越小;π越小代表变量之间的相关 0.6 对应以域 0.5 程度越小,误差越大图8为实验结束时系统状态向 0.4 0.3 量对应的协方差系数阵。 0.2 0.1 1.0:所有特征 4 0 16 50 0.9 对应风域 0.8 0.7!新发现特征 图9机器人和目标方差系数阵图 150 0.6 对应区域 0 Fig.9 Covariance coefficients of robot and target 200 0.4 0.3 0.2 4结束语 200 10 50100150200 本文介绍了基于IMM的机器人未知环境下动 图8系统协方差系数阵图 态目标跟踪方法,仿真实验证明了该方法的有效性, Fig.8 Covariance coefficients of system 本文假设机器人能够正确区别目标和特征产生的观 此协方差系数阵是对机器人、目标以及135个特 测值,而该问题将是算法应用到实践所必须解决的, 征相关性的描述,其中点线间隔虚线包围的区域对应 其解决的方向可以考虑基于占用栅格地图的运动物 所有已发现的135个特征,线线间隔虚线包含区域对 体检测方法,如何将目标检测和目标跟踪相结合将 应其中新发现的3个特征,其余部分对应机器人和 是今后研究的方向, 目标从该图可见,线线间隔虚线包含区域对应的协 参考文献: 方差系数值较小,因此其对应的新发现特征的误差较 大,随着估计的进行这部分区域的协方差系数值将逐 [1]BESL P J,MCKAY N D.A method for registration of 3-D 步变大(对应颜色将加深,类似于点线间隔虚线包围 shapes[J].IEEE Transactions on Pattern Analysis and Ma- chine Intelligence,1992,14(2):239-256. 的区域的其他部分),这也就解释图7中为何特征在 [2]王奎民.基于激光测距的环境地图动态创建技术研究 刚加入系统向量时误差较大,而随着估计的进行误差 [J].自动化技术与应用,2009,28(5):4446. 逐渐减小,下面分析机器人和目标对应的协方差系 WANG Kuimin.The dynamic environment mapping technol- ogy based on laser measurement sensor[J].Techniques of 数,将图8左上部分放大如图9所示 Automation and Applications,2009,28(5):44-46. 图9中点虚线包含的区域代表机器人自身以及 [3]INGUEZ J,LAMIRAUX F,MONTESANO L.Metric-based 机器人与目标、机器人与特征之间的相关程度.线虚 scan matching algorithms for mobile robot displacement esti-