正在加载图片...
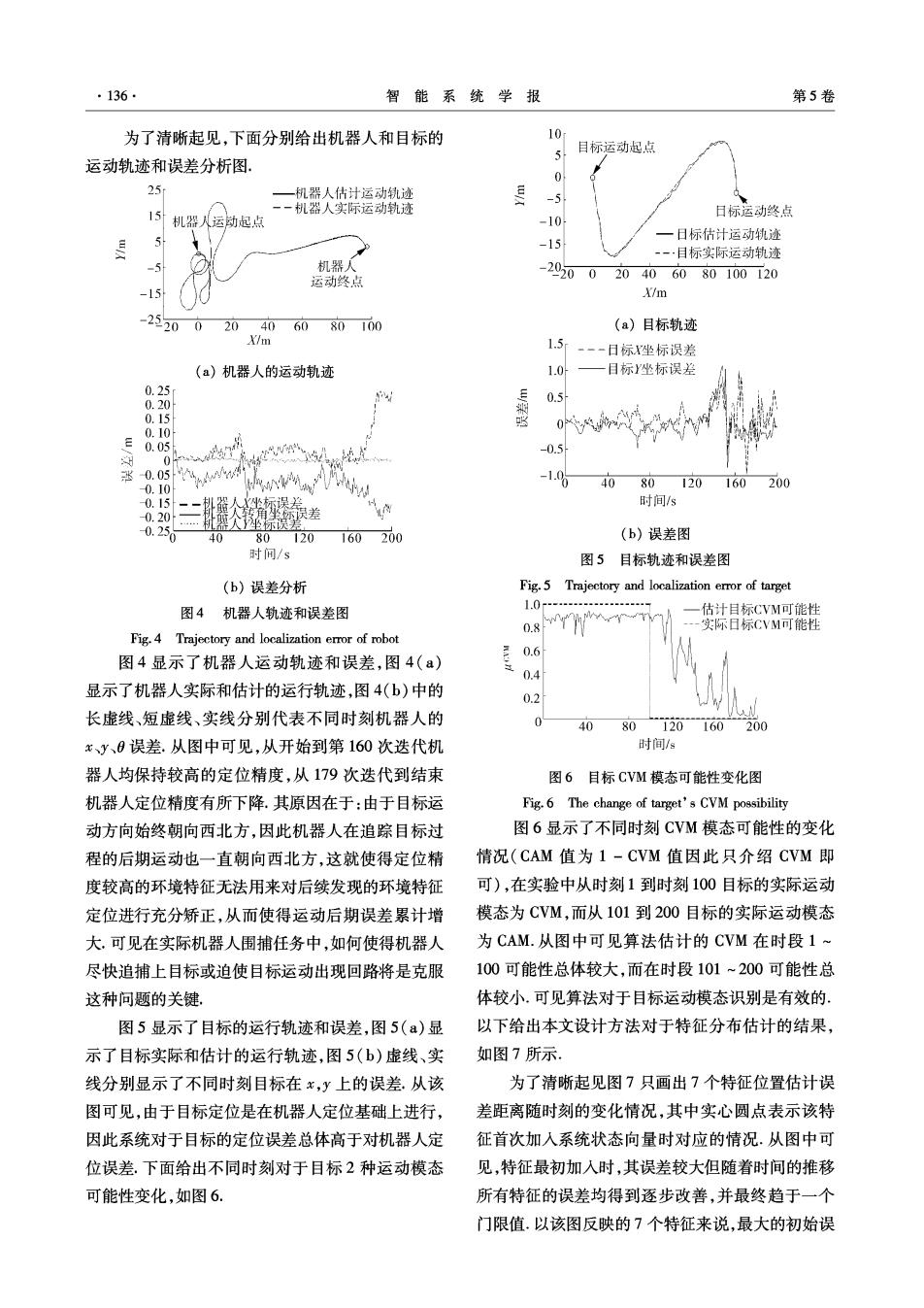
·136 智能系统学报 第5卷 为了清晰起见,下面分别给出机器人和目标的 10 目标运动起,点 运动轨迹和误差分析图, 25 一机器人估计运动轨迹 -5 一一机器人实际运动轨迹 15机器人运动起点 日标运动终点 -10 一日标估计运动轨迹 -15 -·目标实际运动轨迹 机器 运动终点 -2020020406080100120 -15 X/m -25200 20406080100 (a)目标轨迹 X/m 1.5 一一-日标X坐标误差 (a)机器人的运动轨迹 1.0 目标Y坐标误差 0.25 E 0.5 0.20 0.15 0.10 0 0. 0w -0.5 -0.0 10 0.10 40 80120 160 200 0.15 机器人坐标误差 时间/s 0.20 0.25 一人速差 40 80120 160200 (b)误差图 时问/s 图5目标轨迹和误差图 (b)误差分析 Fig.5 Trajectory and localization error of target 图4机器人轨迹和误差图 1.0- 估计目标CVM可能性 -实际日标CVM可能性 Fig.4 Trajectory and localization error of robot 0.6 图4显示了机器人运动轨迹和误差,图4(a) 0.4 显示了机器人实际和估计的运行轨迹,图4(b)中的 0.2 长虚线、短虚线、实线分别代表不同时刻机器人的 40 80120160200 x、y、9误差.从图中可见,从开始到第160次迭代机 时间/s 器人均保持较高的定位精度,从179次迭代到结束 图6目标CVM模态可能性变化图 机器人定位精度有所下降.其原因在于:由于目标运 Fig.6 The change of target's CVM possibility 动方向始终朝向西北方,因此机器人在追踪目标过 图6显示了不同时刻CVM模态可能性的变化 程的后期运动也一直朝向西北方,这就使得定位精 情况(CAM值为1-CVM值因此只介绍CVM即 度较高的环境特征无法用来对后续发现的环境特征 可),在实验中从时刻1到时刻100目标的实际运动 定位进行充分矫正,从而使得运动后期误差累计增 模态为CVM,而从101到200目标的实际运动模态 大.可见在实际机器人围捕任务中,如何使得机器人 为CAM.从图中可见算法估计的CVM在时段1~ 尽快追捕上目标或迫使目标运动出现回路将是克服 100可能性总体较大,而在时段101~200可能性总 这种问题的关键, 体较小.可见算法对于目标运动模态识别是有效的。 图5显示了目标的运行轨迹和误差,图5(a)显 以下给出本文设计方法对于特征分布估计的结果, 示了目标实际和估计的运行轨迹,图5(b)虚线、实 如图7所示. 线分别显示了不同时刻目标在x,y上的误差从该 为了清晰起见图7只画出7个特征位置估计误 图可见,由于目标定位是在机器人定位基础上进行, 差距离随时刻的变化情况,其中实心圆点表示该特 因此系统对于目标的定位误差总体高于对机器人定 征首次加入系统状态向量时对应的情况.从图中可 位误差.下面给出不同时刻对于目标2种运动模态 见,特征最初加人时,其误差较大但随着时间的推移 可能性变化,如图6. 所有特征的误差均得到逐步改善,并最终趋于一个 门限值.以该图反映的7个特征来说,最大的初始误