正在加载图片...
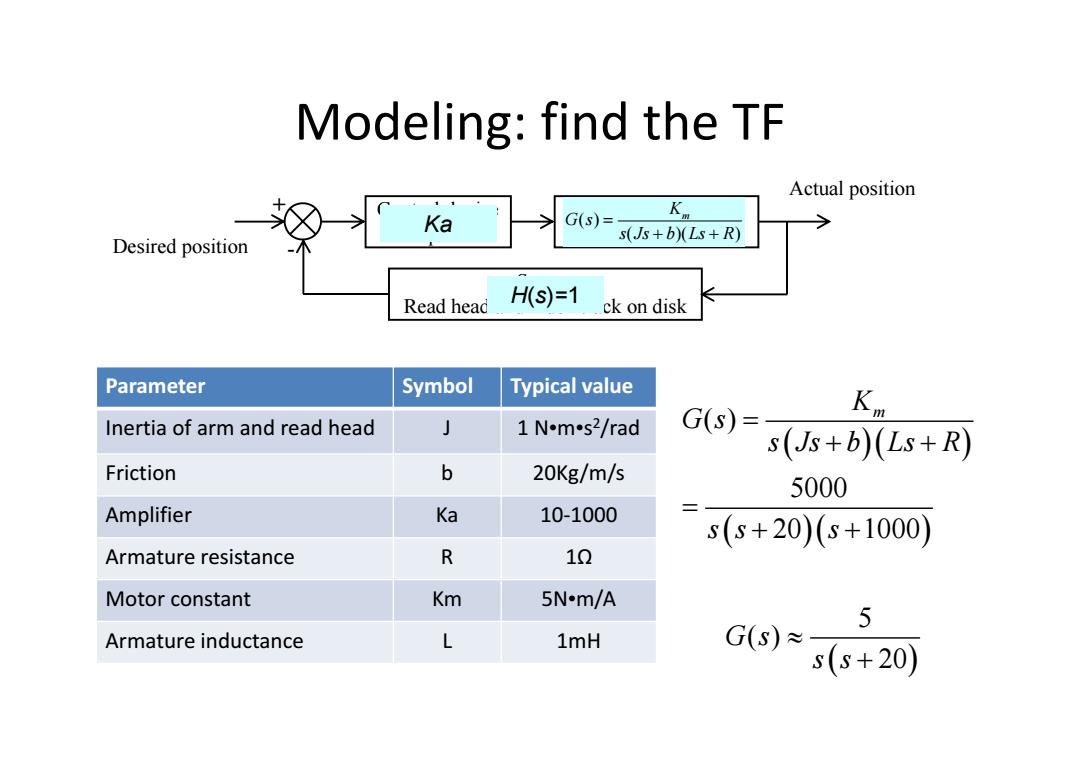
Modeling:find the TF Actual position Ka G(s)= s(Js+b)(Ls+R) Desired position Read head HS)=1 ck on disk Parameter Symbol Typical value Inertia of arm and read head 1 N.m-s2/rad G(s)= (Js+b)(Ls+R) Friction b 20Kg/m/s 5000 Amplifier Ka 10-1000 s(s+20)(s+1000) Armature resistance R 10 Motor constant Km 5N-m/A 5 Armature inductance L 1mH G(s)≈ s(s+20)Modeling: find the TF Control device Amplifier Motor and read arm DC motor and arm Sensor Read head and index track on disk Desired position Actual position + - Ka H(s)=1 ( ) ( )( ) Km G s s Js b Ls R Parameter Symbol Typical value Inertia of arm and read head J 1 N•m•s2/rad Friction b 20Kg/m/s Amplifier Ka 10‐1000 Armature resistance R 1Ω Motor constant Km 5N•m/A Armature inductance L 1mH ( ) 5000 20 1000 K m G s s Js b Ls R ss s 5 ( ) 20 G s s s