正在加载图片...
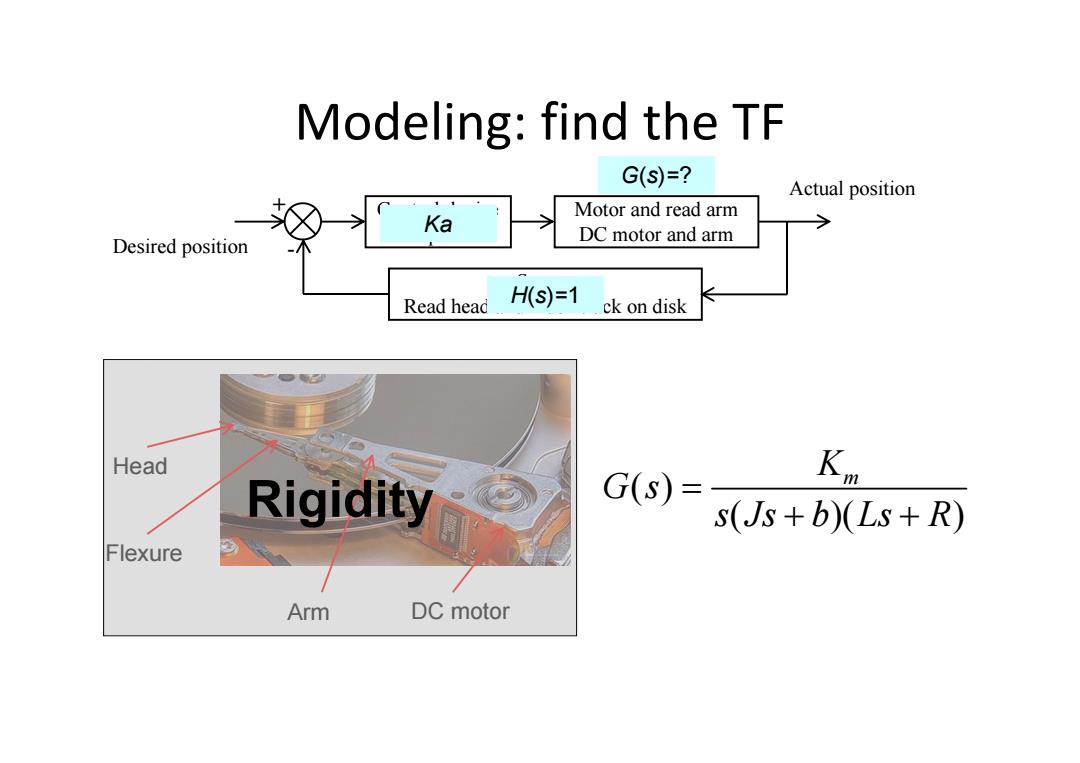
Modeling:find the TF G(S)=? Actual position Motor and read arm Ka Desired position DC motor and arm Read head HS)=1 ck on disk Head G(s) Kn Rigidity s(Js+b)(Ls+R) Flexure Arm DC motorModeling: find the TF Control device Amplifier Motor and read arm DC motor and arm Sensor Read head and index track on disk Desired position Actual position + - Ka H(s)=1 G(s)=? Arm DC motor Flexure Head Rigidity ( ) ( )( ) Km G s s Js b Ls R