正在加载图片...
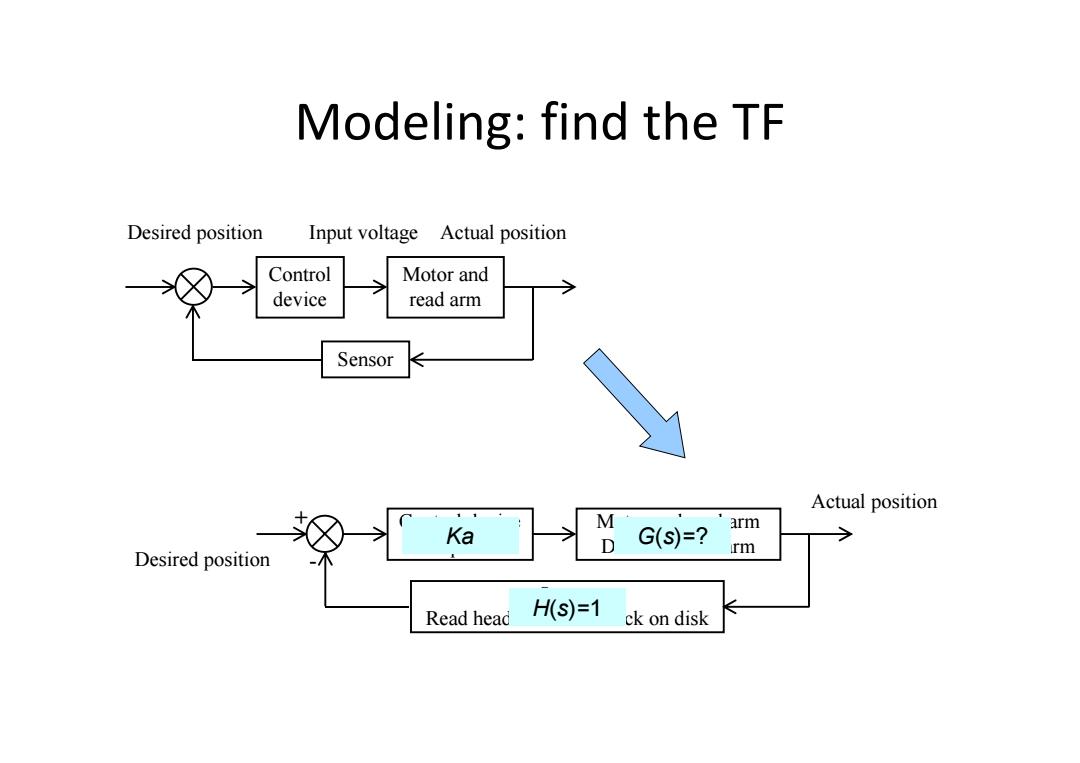
Modeling:find the TF Desired position Input voltage Actual position Control Motor and device read arm Sensor Actual position arm Ka D G(s)=? rm Desired position Read head H(S)=1 ck on diskModeling: find the TF Control device Motor and read arm Sensor Desired position Actual position Input voltage Control device Amplifier Motor and read arm DC motor and arm Sensor Read head and index track on disk Desired position Actual position + - Ka H(s)=1 G(s)=?