正在加载图片...
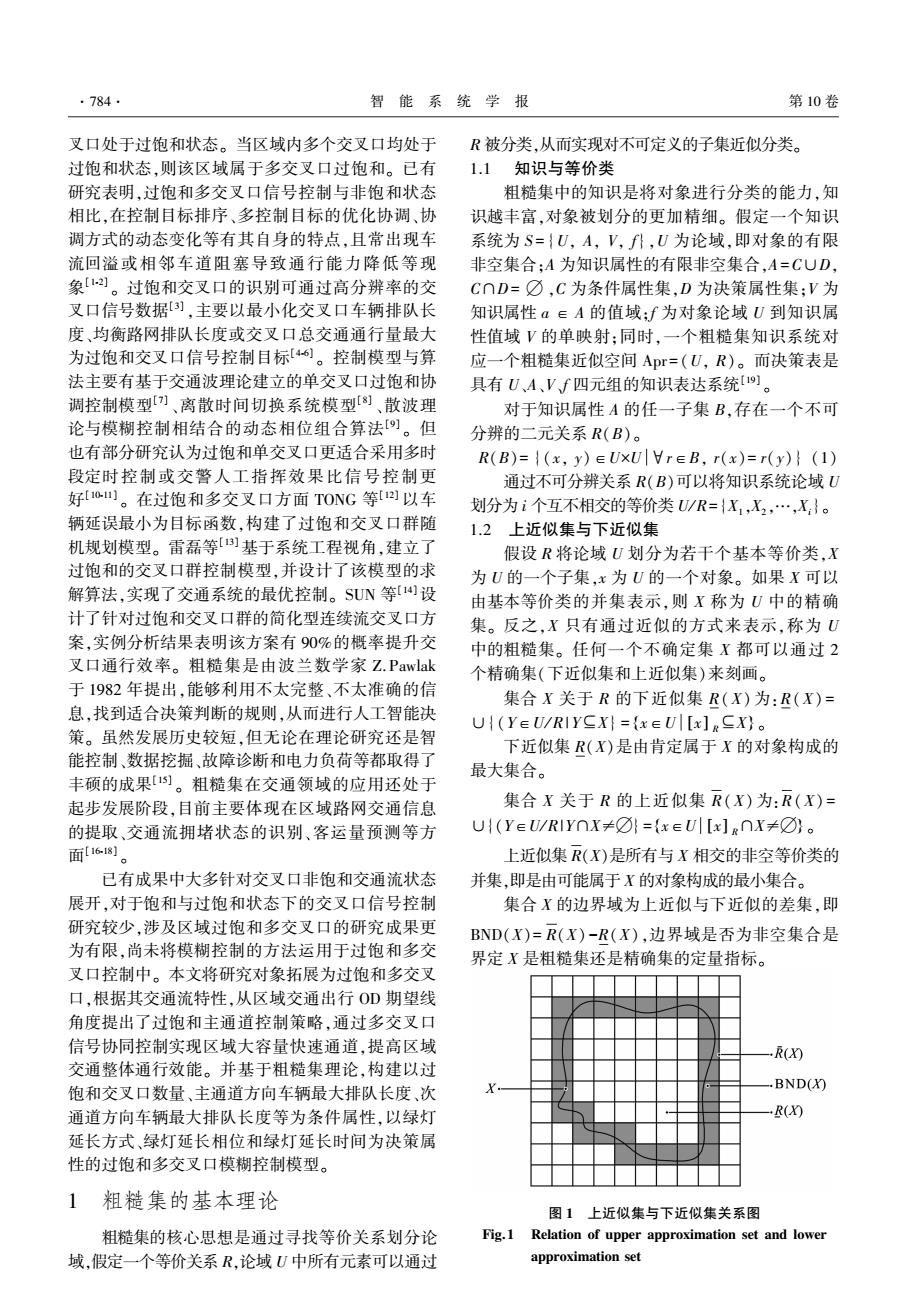
·784 智能系统学报 第10卷 叉口处于过饱和状态。当区域内多个交叉口均处于 R被分类,从而实现对不可定义的子集近似分类。 过饱和状态,则该区域属于多交叉口过饱和。已有 1.1知识与等价类 研究表明,过饱和多交叉口信号控制与非饱和状态 粗糙集中的知识是将对象进行分类的能力,知 相比,在控制目标排序、多控制目标的优化协调、协 识越丰富,对象被划分的更加精细。假定一个知识 调方式的动态变化等有其自身的特点,且常出现车 系统为S={U,A,V,f},U为论域,即对象的有限 流回溢或相邻车道阻塞导致通行能力降低等现 非空集合;A为知识属性的有限非空集合,A=CUD, 象②。过饱和交叉口的识别可通过高分辨率的交 C∩D=⑦,C为条件属性集,D为决策属性集:V为 叉口信号数据[],主要以最小化交叉口车辆排队长 知识属性a∈A的值域:f为对象论域U到知识属 度、均衡路网排队长度或交叉口总交通通行量最大 性值域V的单映射:同时,一个粗糙集知识系统对 为过饱和交叉口信号控制目标46)。控制模型与算 应一个粗糙集近似空间Apr=(U,R)。而决策表是 法主要有基于交通波理论建立的单交叉口过饱和协 具有U、A、Vf四元组的知识表达系统[例 调控制模型)、离散时间切换系统模型)】、散波理 对于知识属性A的任一子集B,存在一个不可 论与模糊控制相结合的动态相位组合算法[9)。但 分辨的二元关系R(B)。 也有部分研究认为过饱和单交叉口更适合采用多时 R(B)={(x,y)∈UxU|Hr∈B,r(x)=r(y)}(I) 段定时控制或交警人工指挥效果比信号控制更 通过不可分辨关系R(B)可以将知识系统论域U 好[1)。在过饱和多交叉口方面TONG等[2]以车 划分为i个互不相交的等价类U/R={X,X2,…,X:}。 辆延误最小为目标函数,构建了过饱和交叉口群随 1.2上近似集与下近似集 机规划模型。雷磊等]基于系统工程视角,建立了 假设R将论域U划分为若千个基本等价类,X 过饱和的交叉口群控制模型,并设计了该模型的求 为U的一个子集,x为U的一个对象。如果X可以 解算法,实现了交通系统的最优控制。SUN等14]设 由基本等价类的并集表示,则X称为U中的精确 计了针对过饱和交叉口群的简化型连续流交叉口方 集。反之,X只有通过近似的方式来表示,称为U 案,实例分析结果表明该方案有90%的概率提升交 中的粗糙集。任何一个不确定集X都可以通过2 叉口通行效率。粗糙集是由波兰数学家Z.Pawlak 个精确集(下近似集和上近似集)来刻画。 于1982年提出,能够利用不太完整、不太准确的信 集合X关于R的下近似集R(X)为:R(X)= 息,找到适合决策判断的规则,从而进行人工智能决 U{(Y∈U/RIYCX}={x∈Ul[x]RCX}。 策。虽然发展历史较短,但无论在理论研究还是智 下近似集R(X)是由肯定属于X的对象构成的 能控制、数据挖掘、故障诊断和电力负荷等都取得了 最大集合。 丰硕的成果)。粗糙集在交通领域的应用还处于 起步发展阶段,目前主要体现在区域路网交通信息 集合X关于R的上近似集R(X)为:R(X)= 的提取、交通流拥堵状态的识别、客运量预测等方 U{(Y∈U/RIYOX≠O}={x∈U|[x]R∩X≠O}。 面1618) 上近似集R(X)是所有与X相交的非空等价类的 已有成果中大多针对交叉口非饱和交通流状态 并集,即是由可能属于X的对象构成的最小集合。 展开,对于饱和与过饱和状态下的交叉口信号控制 集合X的边界域为上近似与下近似的差集,即 研究较少,涉及区域过饱和多交叉口的研究成果更 BND(X)=R(X)-R(X),边界域是否为非空集合是 为有限,尚未将模糊控制的方法运用于过饱和多交 界定X是粗糙集还是精确集的定量指标。 叉口控制中。本文将研究对象拓展为过饱和多交叉 口,根据其交通流特性,从区域交通出行OD期望线 角度提出了过饱和主通道控制策略,通过多交叉口 信号协同控制实现区域大容量快速通道,提高区域 .(X0 交通整体通行效能。并基于粗糙集理论,构建以过 饱和交叉口数量、主通道方向车辆最大排队长度、次 BND(X) 通道方向车辆最大排队长度等为条件属性,以绿灯 R(X) 延长方式、绿灯延长相位和绿灯延长时间为决策属 性的过饱和多交叉口模糊控制模型。 1 粗糙集的基本理论 图1上近似集与下近似集关系图 粗糙集的核心思想是通过寻找等价关系划分论 Fig.1 Relation of upper approximation set and lower 域,假定一个等价关系R,论域U中所有元素可以通过 approximation set叉口处于过饱和状态。 当区域内多个交叉口均处于 过饱和状态,则该区域属于多交叉口过饱和。 已有 研究表明,过饱和多交叉口信号控制与非饱和状态 相比,在控制目标排序、多控制目标的优化协调、协 调方式的动态变化等有其自身的特点,且常出现车 流回溢或相邻车道阻塞导致通行能力降低等现 象[1⁃2] 。 过饱和交叉口的识别可通过高分辨率的交 叉口信号数据[3] ,主要以最小化交叉口车辆排队长 度、均衡路网排队长度或交叉口总交通通行量最大 为过饱和交叉口信号控制目标[4⁃6] 。 控制模型与算 法主要有基于交通波理论建立的单交叉口过饱和协 调控制模型[7] 、离散时间切换系统模型[8] 、散波理 论与模糊控制相结合的动态相位组合算法[9] 。 但 也有部分研究认为过饱和单交叉口更适合采用多时 段定时控制或交警人工指挥效果比信号控制更 好[10⁃11] 。 在过饱和多交叉口方面 TONG 等[12] 以车 辆延误最小为目标函数,构建了过饱和交叉口群随 机规划模型。 雷磊等[13]基于系统工程视角,建立了 过饱和的交叉口群控制模型,并设计了该模型的求 解算法,实现了交通系统的最优控制。 SUN 等[14]设 计了针对过饱和交叉口群的简化型连续流交叉口方 案,实例分析结果表明该方案有 90%的概率提升交 叉口通行效率。 粗糙集是由波兰数学家 Z. Pawlak 于 1982 年提出,能够利用不太完整、不太准确的信 息,找到适合决策判断的规则,从而进行人工智能决 策。 虽然发展历史较短,但无论在理论研究还是智 能控制、数据挖掘、故障诊断和电力负荷等都取得了 丰硕的成果[15] 。 粗糙集在交通领域的应用还处于 起步发展阶段,目前主要体现在区域路网交通信息 的提取、交通流拥堵状态的识别、客运量预测等方 面[16⁃18] 。 已有成果中大多针对交叉口非饱和交通流状态 展开,对于饱和与过饱和状态下的交叉口信号控制 研究较少,涉及区域过饱和多交叉口的研究成果更 为有限,尚未将模糊控制的方法运用于过饱和多交 叉口控制中。 本文将研究对象拓展为过饱和多交叉 口,根据其交通流特性,从区域交通出行 OD 期望线 角度提出了过饱和主通道控制策略,通过多交叉口 信号协同控制实现区域大容量快速通道,提高区域 交通整体通行效能。 并基于粗糙集理论,构建以过 饱和交叉口数量、主通道方向车辆最大排队长度、次 通道方向车辆最大排队长度等为条件属性,以绿灯 延长方式、绿灯延长相位和绿灯延长时间为决策属 性的过饱和多交叉口模糊控制模型。 1 粗糙集的基本理论 粗糙集的核心思想是通过寻找等价关系划分论 域,假定一个等价关系 R,论域 U 中所有元素可以通过 R 被分类,从而实现对不可定义的子集近似分类。 1.1 知识与等价类 粗糙集中的知识是将对象进行分类的能力,知 识越丰富,对象被划分的更加精细。 假定一个知识 系统为 S = {U, A, V, f},U 为论域,即对象的有限 非空集合;A 为知识属性的有限非空集合,A =C∪D, C∩D= ∅ ,C 为条件属性集,D 为决策属性集;V 为 知识属性 a ∈ A 的值域;f 为对象论域 U 到知识属 性值域 V 的单映射;同时,一个粗糙集知识系统对 应一个粗糙集近似空间 Apr = (U, R)。 而决策表是 具有 U、A、V、f 四元组的知识表达系统[19] 。 对于知识属性 A 的任一子集 B,存在一个不可 分辨的二元关系 R(B)。 R(B)= {(x, y)∈U×U ∀r∈B, r(x)= r(y)} (1) 通过不可分辨关系 R(B)可以将知识系统论域 U 划分为 i 个互不相交的等价类 U/ R={X1,X2,…,Xi}。 1.2 上近似集与下近似集 假设 R 将论域 U 划分为若干个基本等价类,X 为 U 的一个子集,x 为 U 的一个对象。 如果 X 可以 由基本等价类的并集表示,则 X 称为 U 中的精确 集。 反之,X 只有通过近似的方式来表示,称为 U 中的粗糙集。 任何一个不确定集 X 都可以通过 2 个精确集(下近似集和上近似集)来刻画。 集合 X 关于 R 的下近似集 R(X) 为:R(X) = ∪{(Y∈U/ R | Y⊆X} = x∈U [x] { R⊆X} 。 下近似集 R(X)是由肯定属于 X 的对象构成的 最大集合。 集合 X 关于 R 的上近似集 R(X) 为:R(X) = ∪{(Y∈U/ R|Y∩X≠∅} = x∈U [x] { R∩X≠∅} 。 上近似集 R(X)是所有与 X 相交的非空等价类的 并集,即是由可能属于 X 的对象构成的最小集合。 集合 X 的边界域为上近似与下近似的差集,即 BND(X)= R(X) -R(X),边界域是否为非空集合是 界定 X 是粗糙集还是精确集的定量指标。 图 1 上近似集与下近似集关系图 Fig.1 Relation of upper approximation set and lower approximation set ·784· 智 能 系 统 学 报 第 10 卷