正在加载图片...
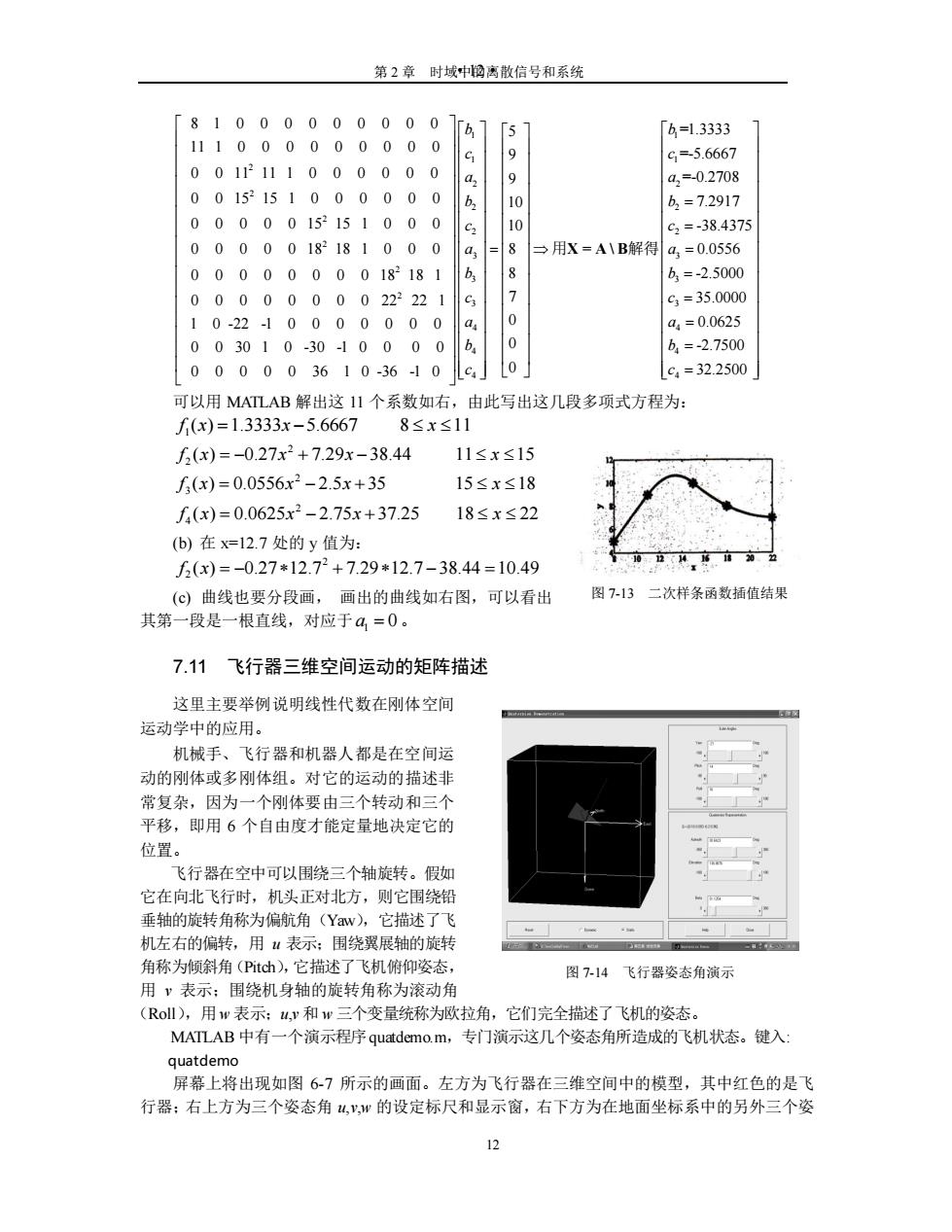
第2章时域中物离散信号和系统 k■1.3333 9=5.6667 0112 a,=-0.2708 1 o b,=7.2917 10 .38437 8 一用X=A1B解得 4=0.0556 b h.=-2.5000 22 =350000 0 a=0.0625 003010.-30-1000 0 b.=-2.7500 000003610-3610 0 [9=32.2500 可以用MATLAB解出这11个系数如右,由此写出这几段多项式方程为: fx)=1.3333x-5.6667 8≤x≤11 f53(x)=-0.27x2+7.29x-38.44 11≤x≤15 5(x)=0.0556.x2-2.5x+35 15≤x≤18 f(x)=0.0625x2-2.75x+37.25 18≤x≤22 (b)在x=12.7处的y值为: f5(x)=-0.27*12.72+7.29*12.7-38.44=10.49 (©)曲线也要分段画,画出的曲线如右图,可以看出 图7-13 二次样条函数插值结果 其第一段是一根直线,对应于4=0。 7.11 飞行器三维空间运动的矩阵描述 这里主要举例说明线性代数在刚体空间 运动学中的应用。 机械手、飞行器和机器人都是在空间运 动的刚体或多刚体组。对它的运动的描述非 常复杂,因为 ,个刚体要由三个转动和 三个 平移,即用6个自由度才能定量地决定它的 位置。 飞行器在空中可以围绕三个轴旋转。假如 它在向北飞行时,机头正对北方,则它围绕 垂轴的旋转角称为偏航角(Yaw),它描述了飞 机左右的偏转,用“表示:围绕翼展轴的旋转 角称为倾斜角(Pth),它描述了飞机俯仰姿态, 图7-14飞行器姿态角演示 用表示:围绕机身轴的旋转角称为滚动角 (Rol),用w表示:,r和w三个变量统称为欧拉角,它们完全描述了飞机的姿态。 MATLAB中有一个演示程序quatdemo.m,专门演示这几个姿态角所造成的飞机状态。键入: quatdemo 屏幕上将出现如图6-7所示的画面。左方为飞行器在三维空间中的模型,其中红色的是飞 行器:右上方为三个姿态角,w的设定标尺和显示窗,右下方为在地面坐标系中的另外三个姿 12 第 2 章 时域中的离散信号和系统 ·12· 12 1 1 2 2 2 2 2 2 2 3 2 2 8 1 0 0 0 0 0 0 0 0 0 11 1 0 0 0 0 0 0 0 0 0 0 0 11 11 1 0 0 0 0 0 0 0 0 15 15 1 0 0 0 0 0 0 0 0 0 0 0 15 15 1 0 0 0 0 0 0 0 0 18 18 1 0 0 0 0 0 0 0 0 0 0 0 18 18 1 0 0 0 0 0 0 0 0 22 22 1 1 0 -22 -1 0 0 0 0 0 0 0 0 0 30 1 0 -30 -1 0 0 0 0 0 0 0 0 0 36 1 0 -36 -1 0 b c a b c a b 1 1 2 2 2 3 3 3 3 3 4 4 4 4 4 5 =1.3333 9 =-5.6667 9 =-0.2708 10 7.2917 10 -38.4375 8 0.0556 8 -2.5000 7 35.0000 0 0.0625 0 -2.7500 0 b c a b c a b c c a a b b c c = = = = = = = = 用X = A \ B解得 4 32.2500 = 可以用 MATLAB 解出这 11 个系数如右,由此写出这几段多项式方程为: 1 f x x x ( ) 1.3333 5.6667 8 11 = − 2 2 f x x x x ( ) 0.27 7.29 38.44 11 15 = − + − 2 3 f x x x x ( ) 0.0556 2.5 35 15 18 = − + 2 4 f x x x x ( ) 0.0625 2.75 37.25 18 22 = − + (b) 在 x=12.7 处的 y 值为: 2 2 f x( ) 0.27 12.7 7.29 12.7 38.44 10.49 = − + − = (c) 曲线也要分段画, 画出的曲线如右图,可以看出 其第一段是一根直线,对应于 1 a = 0 。 7.11 飞行器三维空间运动的矩阵描述 这里主要举例说明线性代数在刚体空间 运动学中的应用。 机械手、飞行器和机器人都是在空间运 动的刚体或多刚体组。对它的运动的描述非 常复杂,因为一个刚体要由三个转动和三个 平移,即用 6 个自由度才能定量地决定它的 位置。 飞行器在空中可以围绕三个轴旋转。假如 它在向北飞行时,机头正对北方,则它围绕铅 垂轴的旋转角称为偏航角(Yaw),它描述了飞 机左右的偏转,用 u 表示;围绕翼展轴的旋转 角称为倾斜角(Pitch),它描述了飞机俯仰姿态, 用 v 表示;围绕机身轴的旋转角称为滚动角 (Roll),用w 表示;u,v 和 w 三个变量统称为欧拉角,它们完全描述了飞机的姿态。 MATLAB 中有一个演示程序quatdemo.m,专门演示这几个姿态角所造成的飞机状态。键入: quatdemo 屏幕上将出现如图 6-7 所示的画面。左方为飞行器在三维空间中的模型,其中红色的是飞 行器;右上方为三个姿态角 u,v,w 的设定标尺和显示窗,右下方为在地面坐标系中的另外三个姿 图 7-14 飞行器姿态角演示 图 7-13 二次样条函数插值结果