正在加载图片...
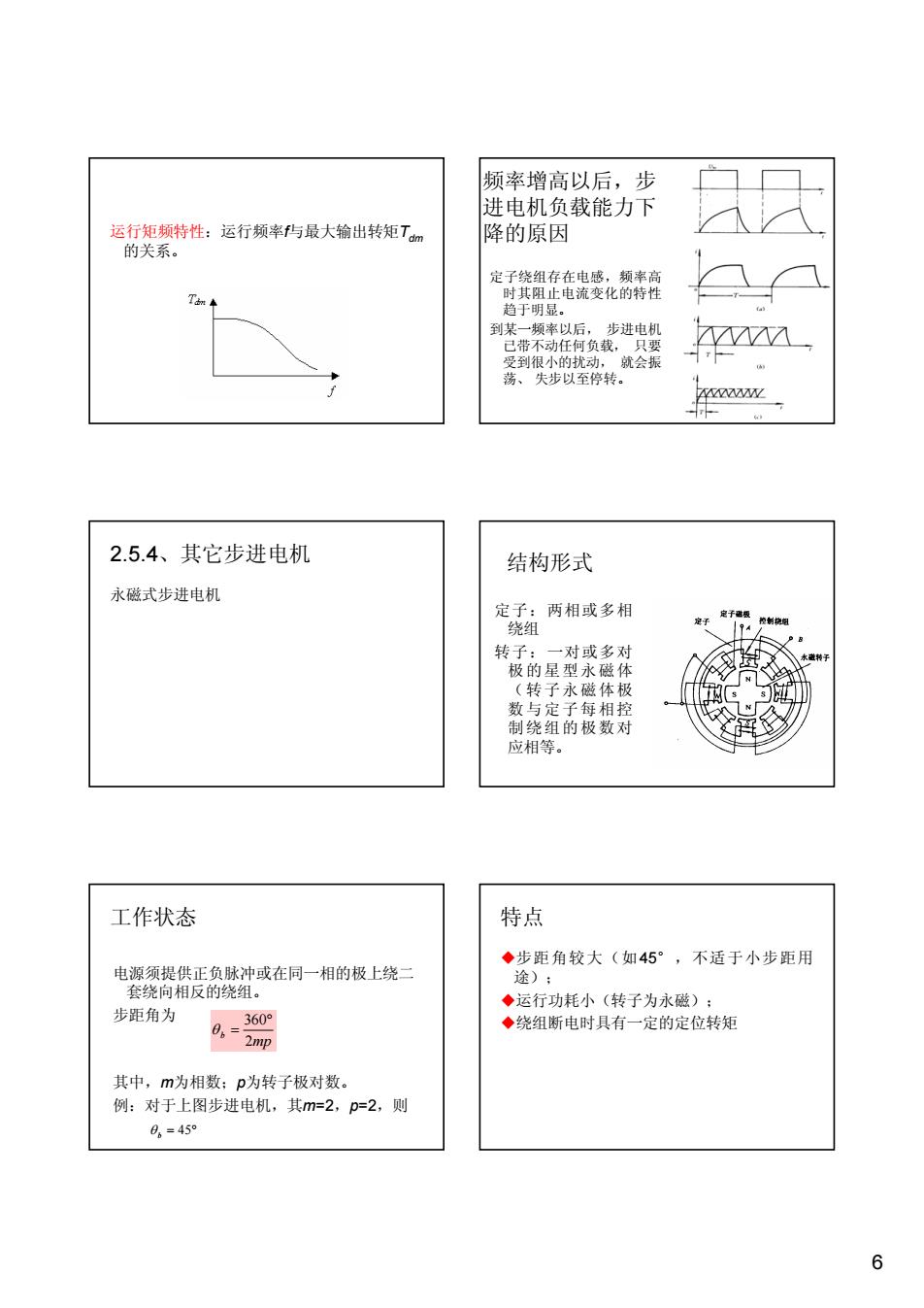
频率增高以后,步 进电机负载能力下 运行矩频特性:运行频率f5最大输出转矩Tm 降的原因 的关系。 定子绕组存在电感,频率高 时其阻止电流变化的特性 趋于明显。 到某一频率以后,步进电机 已带不动任何负载,只要 受到很小的扰动,就会振 荡、失步以至停转。 WW 2.5.4、其它步进电机 结构形式 永磁式步进电机 定子:两相或多相 绕组 定了 转子:一对或多对 极的星型永磁体 (转子永磁体极 数与定子每相控 制绕组的极数对 应相等。 工作状态 特点 ◆步距角较大(如45°,不适于小步距用 电源须提供正负脉冲或在同一相的极上绕二 途); 套绕向相反的绕组。 ◆运行功耗小(转子为永磁): 步距角为 360° 0。= ◆绕组断电时具有一定的定位转矩 2mp 其中,m为相数:p为转子极对数。 例:对于上图步进电机,其m=2,p=2,则 0。=45° 66 运行矩频特性:运行频率f与最大输出转矩Tdm 的关系。 频率增高以后,步 进电机负载能力下 降的原因 定子绕组存在电感,频率高 时其阻止电流变化的特性 趋于明显。 到某一频率以后, 步进电机 已带不动任何负载, 只要 受到很小的扰动, 就会振 荡、 失步以至停转。 2.5.4、其它步进电机 永磁式步进电机 结构形式 定子:两相或多相 绕组 转子:一对或多对 极的星型永磁体 (转子永磁体极 数与定子每相控 制绕组的极数对 应相等。 工作状态 电源须提供正负脉冲或在同一相的极上绕二 套绕向相反的绕组。 步距角为 其中,m为相数;p为转子极对数。 例:对于上图步进电机,其m=2,p=2,则 mp b 2 360° θ = = 45° θ b 特点 步距角较大(如45°,不适于小步距用 途); 运行功耗小(转子为永磁); 绕组断电时具有一定的定位转矩