正在加载图片...
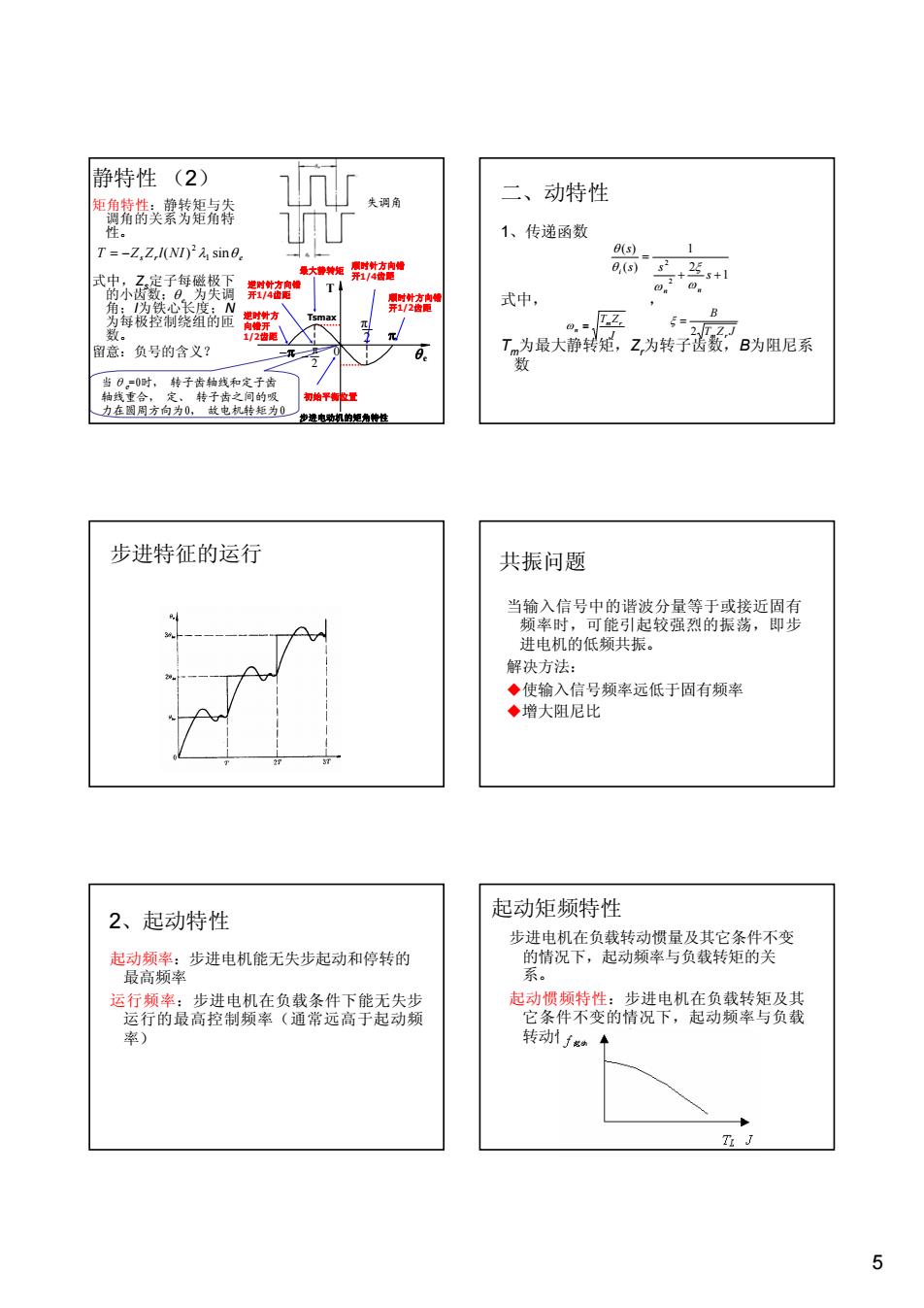
静特性(2) 矩角特性:,静转矩与失 失调角 二、动特性 调角的关系为矩角特 性 1、传递函数 T=-Z,Z,I(NI)sin0 1 式中,Z定子每磁极下 最大普柜 逆时针方向错 T 的小齿数:日为失调 开1/4曲距 角:为铁心长度:N 式中, 为每极控制绕组的匝 逆时针方 T.Z, B 数。 0.= 1/2地距 元/ 5=2T2 留意:负号的含义? Tm为最大静转矩,Z为转子数, B为阻尼系 数 当日=0时,转子齿轴线和定子齿 轴线重合,定、转子齿之间的吸 初始平物散量 力在圈周方向为0,故电机转矩为0 岁进电机的矩角物性 步进特征的运行 共振问题 当输入信号中的谐波分量等于或接近固有 频率时,可能引起较强烈的振荡,即步 进电机的低频共振。 解决方法: ◆使输入信号频率远低于固有频率 ◆增大阻尼比 2、起动特性 起动矩频特性 步进电机在负载转动惯量及其它条件不变 起动频率:步进电机能无失步起动和停转的 的情况下,起动频率与负载转矩的关 最高频率 系。 运行频率:步进电机在负载条件下能无失步 起动惯频特性:步进电机在负载转矩及其 运行的最高控制频率(通常远高于起动频 它条件不变的情况下,起动频率与负载 率) 转动1f起 Tr J 55 静特性 (2) 矩角特性:静转矩与失 调角的关系为矩角特 性。 式中,Zs定子每磁极下 的小齿数; 为失调 角;l为铁心长度;N 为每极控制绕组的匝 数。 留意:负号的含义? s r NI e T Z Z l( ) λ1 sinθ 2 = − θ e 失调角 当θe=0时, 转子齿轴线和定子齿 轴线重合, 定、 转子齿之间的吸 力在圆周方向为0, 故电机转矩为0 Tsmax 2 π 2 −π T 0 θ e –π π 步进电动机的矩角特性 最大静转矩 初始平衡位置 顺时针方向错 开1/2齿距 顺时针方向错 开1/4齿距 逆时针方 向错开 1/2齿距 逆时针方向错 开1/4齿距 二、动特性 1、传递函数 式中, , Tm为最大静转矩,Zr 为转子齿数,B为阻尼系 数 1 2 1 ( ) ( ) 2 2 + + = s s s s n n i ω ξ ω θ θ J Tm Zr ω n = T Z J B m r 2 ξ = 步进特征的运行 共振问题 当输入信号中的谐波分量等于或接近固有 频率时,可能引起较强烈的振荡,即步 进电机的低频共振。 解决方法: 使输入信号频率远低于固有频率 增大阻尼比 2、起动特性 起动频率:步进电机能无失步起动和停转的 最高频率 运行频率:步进电机在负载条件下能无失步 运行的最高控制频率(通常远高于起动频 率) 起动矩频特性 步进电机在负载转动惯量及其它条件不变 的情况下,起动频率与负载转矩的关 系。 起动惯频特性:步进电机在负载转矩及其 它条件不变的情况下,起动频率与负载 转动惯量的关系