正在加载图片...
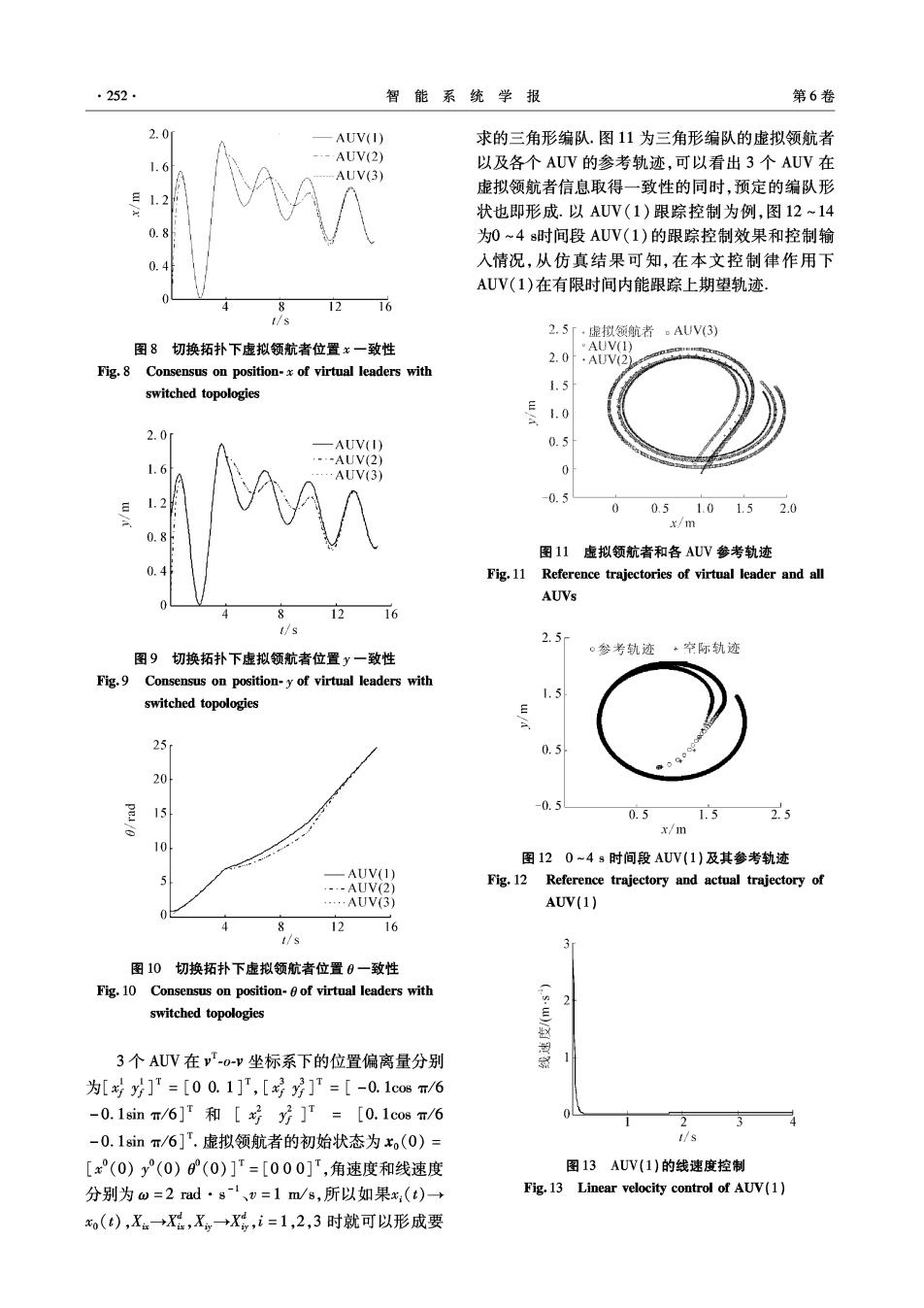
·252. 智能系统学报 第6卷 2.0 AUV(I) 求的三角形编队.图11为三角形编队的虚拟领航者 AUV(2) 1.6 以及各个AUV的参考轨迹,可以看出3个AUV在 AUV(3) 虚拟领航者信息取得一致性的同时,预定的编队形 状也即形成.以AUV(1)跟踪控制为例,图12~14 0.8 为0~4s时间段AUV(1)的跟踪控制效果和控制输 0.4 入情况,从仿真结果可知,在本文控制律作用下 AUV(1)在有限时间内能跟踪上期望轨迹. 8 12 16 t/s 2.5「·虚拟领航者。AUV(3) 图8切换拓扑下虚拟领航者位置x一致性 °AUV(1) 2.0 .AUV(2) Fig.8 Consensus on position-x of virtual leaders with switched topologies 1.5 1.0 2.0 AUV(I) 0.5 --AUV(2) 1.6 AUV(3) 0 1.2 -0.5 0 0.51.01.52.0 x/m 0.8 图11虚拟领航者和各AUV参考轨迹 Fig.11 Reference trajectories of virtual leader and all AUVs 12 16 t/s 2.5 。参考轨迹·空际轨迹 图9切换拓扑下虚拟领航者位置y一致性 Fig.9 Consensus on position-y of virtual leaders with 1.5 switched topologies 25 0.5 30 15 0.5 0.5 1.5 2.5 x/m 10 图120~4s时间段AUV(1)及其参考轨迹 -AUV(1) 5 .--AUV(2) Fig.12 Reference trajectory and actual trajectory of …AUV(3) AUV(1) 8 12 16 t/s 3 图10切换拓扑下虚拟领航者位置0一致性 Fig.10 Consensus on position-0 of virtual leaders with 2 switched topologies 3个AUV在v-o-v坐标系下的位置偏离量分别 为[对]=[00.1],[g]=[-0.1co8m/6 -0.1sinm/6]F和[号号T=[0.1co8m/6 2 3 4 -0.1sinπ/6].虚拟领航者的初始状态为x(0)= t/s [x°(0)y°(0)0(0)]T=[000]',角速度和线速度 图13AUV(1)的线速度控制 分别为w=2rad·8l、v=1m/s,所以如果:(t)→ Fig.13 Linear velocity control of AUV(1) x(t),X.→X,X,→X,i=1,2,3时就可以形成要