正在加载图片...
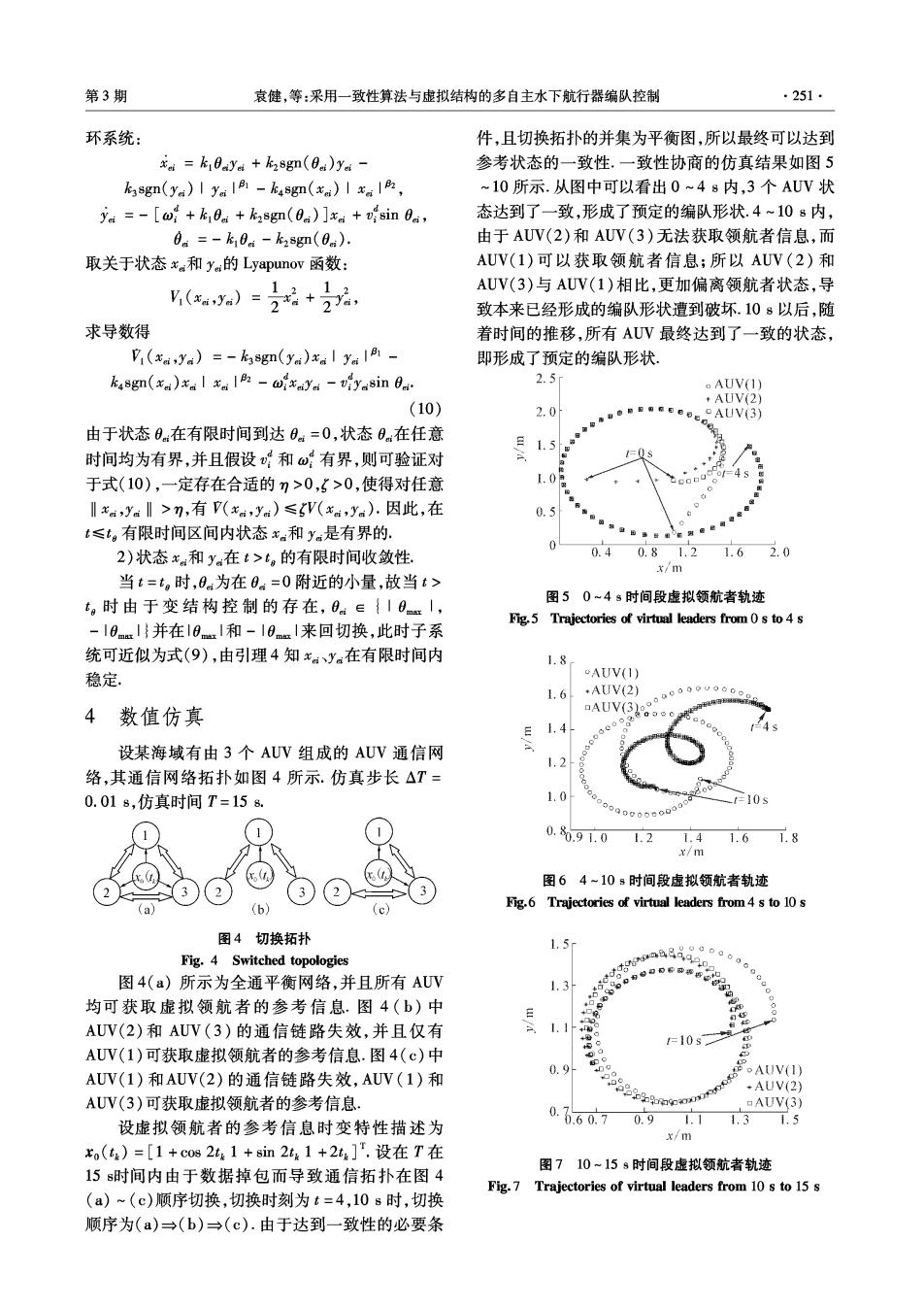
第3期 袁健,等:采用一致性算法与虚拟结构的多自主水下航行器编队控制 ·251 环系统: 件,且切换拓扑的并集为平衡图,所以最终可以达到 %ai =ki0ayai +k28gn(0i)yai- 参考状态的一致性.一致性协商的仿真结果如图5 3gn(ya)lyaI-k4sgm(xa)1xa, ~10所示.从图中可以看出0~48内,3个AUV状 yai =-[o:+k10ni +kasgn(0)]x+vsin 0, 态达到了一致,形成了预定的编队形状.4~108内, 0n=-k0n-k28gm(0n). 由于AUV(2)和AUV(3)无法获取领航者信息,而 取关于状态xa和ya的Lyapunov函数: AUV(1)可以获取领航者信息;所以AUV(2)和 (a》=+. AUV(3)与AUV(1)相比,更加偏离领航者状态,导 致本来已经形成的编队形状遭到破坏.108以后,随 求导数得 着时间的推移,所有AUV最终达到了一致的状态, Vi(xi,ya)=-kasgn(ya)xal yal- 即形成了预定的编队形状 kasgn()x-wyi-viyasin Oa 2.5 AUV(1) +AUV(2) (10) 2.0 由于状态0在有限时间到达0。.=0,状态0在任意 金。=0唐e和Ee0知口AUV{3) g1.5 时间均为有界,并且假设和w有界,则可验证对 于式(10),一定存在合适的7>0,{>0,使得对任意 1.0 o1-4S ‖xaya‖>n,有(xa,ya)≤V(xi,ya).因此,在 0.5 ≤t。有限时间区间内状态x。和y.是有界的. 0 2)状态x和y.在t>t。的有限时间收敛性 0.4 0.81.21.62.0 x/m 当t=t。时,0为在0。=0附近的小量,故当t> 图50~4s时间段虚拟领航者轨迹 t。时由于变结构控制的存在,0∈{|0mr|, Fig.5 Trajectories of virtual leaders from 0s to4s -I0rI}并在10=I和-10ma|来回切换,此时子系 统可近似为式(9),由引理4知xy在有限时间内 1.8 稳定 AUV(1) 1.6 .AUV(2) 4数值仿真 AUV3ooa000000000 1.4 设某海域有由3个AUV组成的AUV通信网 1.2 络,其通信网络拓扑如图4所示.仿真步长△T= 0.018,仿真时间T=158. 1.0 =10 0.80.91.0 1.2 1.41.61.8 x/m 图64~10s时间段虚拟领航者轨迹 h Fig.6 Trajectories of virtual leaders from 4 s to 10 s 图4切换拓扑 1.5 Fig.4 Switched topologies 图4(a)所示为全通平衡网络,并且所有AUV .. 均可获取虚拟领航者的参考信息.图4(b)中 AUV(2)和AUV(3)的通信链路失效,并且仅有 110s AUV(1)可获取虚拟领航者的参考信息.图4(c)中 0.9 AUV(1)和AUV(2)的通信链路失效,AUV(1)和 S88 m产DA ·AUV(2) AUV(3)可获取虚拟领航者的参考信息. 口AUV(3) 设虚拟领航者的参考信息时变特性描述为 0.0.60.7 0.91.11.3 1.5 x/m xo(t)=[1+cos2tk1+sin2tk1+2t].设在T在 图710~15s时间段虚拟领航者轨迹 15s时间内由于数据掉包而导致通信拓扑在图4 Fig.7 Trajectories of virtual leaders from 10 s to 15 s (a)~(c)顺序切换,切换时刻为t=4,10s时,切换 顺序为(a)→(b)→(c).由于达到一致性的必要条