正在加载图片...
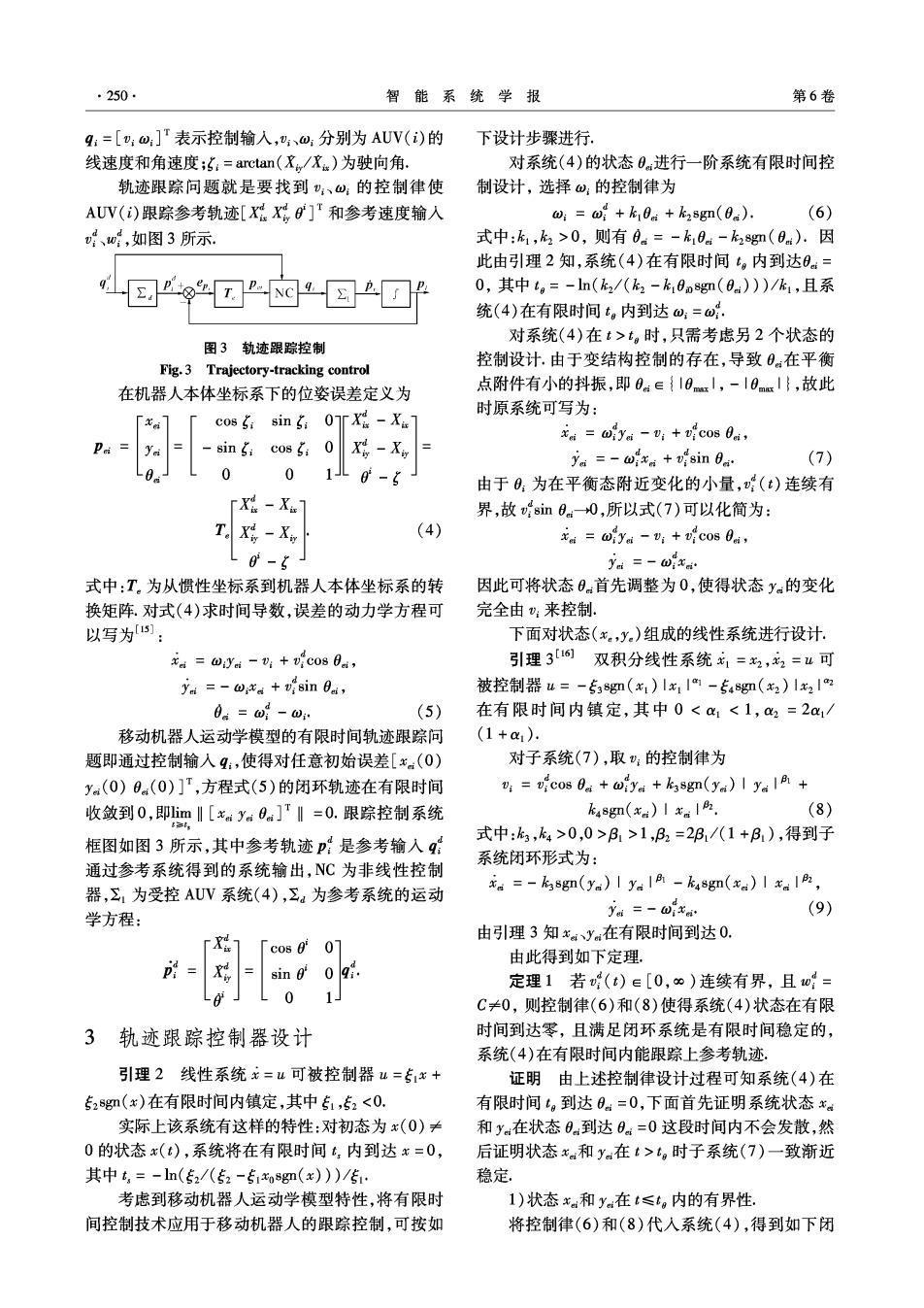
250. 智能系统学报 第6卷 9:=[:ω:]T表示控制输入,、ω:分别为AUV(i)的 下设计步骤进行. 线速度和角速度;:=arctan(Xy/Xa)为驶向角. 对系统(4)的状态0进行一阶系统有限时间控 轨迹跟踪问题就是要找到、ω:的控制律使 制设计,选择ω:的控制律为 AUV(i)跟踪参考轨迹[XXg]和参考速度输人入 0:=+k10+k28gm(0a). (6) 、w,如图3所示。 式中:k1,k2>0,则有0。.=-k0.-k2g(0).因 此由引理2知,系统(4)在有限时间t。内到达0= 0,其中t。=-ln(2/(k2-k0ng(0))/k1,且系 统(4)在有限时间t。内到达o:=o. 对系统(4)在t>t。时,只需考虑另2个状态的 图3轨迹跟踪控制 控制设计.由于变结构控制的存在,导致0在平衡 Fig.3 Trajectory-tracking control 在机器人本体坐标系下的位姿误差定义为 点附件有小的抖振,即0:∈{10=1,-|0msI},故此 时原系统可写为: cos sin x=wiyai -vi+vcos 0n, P= -8in:c08: 0 ya=-+vsin (7) -0a 0 0 由于0:为在平衡态附近变化的小量,(t)连续有 X6-X 界,故sin80,所以式(7)可以化简为: (4) %=wiyai-vi+vcos Oai, g- yi=-ωixar 式中:T。为从惯性坐标系到机器人本体坐标系的转 因此可将状态0首先调整为0,使得状态y.的变化 换矩阵.对式(4)求时间导数,误差的动力学方程可 完全由v:来控制. 以写为5: 下面对状态(x。,y。)组成的线性系统进行设计. £a=ωy-:+ico80, 引理3[6双积分线性系统1=,:2=山可 yd=-ωxa+vsin日, 被控制器u=-专3g知(x1)|x11-专4g(x2)1x21 0。=-w (5) 在有限时间内镇定,其中0<1<1,2=21/ 移动机器人运动学模型的有限时间轨迹跟踪问 (1+1) 题即通过控制输人q:,使得对任意初始误差[x(0) 对子系统(7),取的控制律为 y(0)0.(0)],方程式(5)的闭环轨迹在有限时间 v:=vicos 0 +wiy kasgn(y)I y+ 收敛到0,即im‖[xayt0a]‖=0.跟踪控制系统 k48gn(x)1xe1h. (8) 之 式中:k3,k4>0,0>B1>1,B2=2B/(1+B),得到子 框图如图3所示,其中参考轨迹p:是参考输入q 系统闭环形式为: 通过参考系统得到的系统输出,NC为非线性控制 器,1为受控AUV系统(4),Σ:为参考系统的运动 %=-kasgn(y)I ya l-kasgn() (9) 学方程: Yai =-Wixi 由引理3知xay在有限时间到达0. cos 0i 0 由此得到如下定理 sin 0' 0 定理1若(t)∈[0,o)连续有界,且w= 0 1 C≠0,则控制律(6)和(8)使得系统(4)状态在有限 3 轨迹跟踪控制器设计 时间到达零,且满足闭环系统是有限时间稳定的, 系统(4)在有限时间内能跟踪上参考轨迹 引理2线性系统云=u可被控制器4=专1x+ 证明由上述控制律设计过程可知系统(4)在 52g(x)在有限时间内镇定,其中51,2<0. 有限时间。到达0=0,下面首先证明系统状态x。 实际上该系统有这样的特性:对初态为x(0)≠ 和y在状态0到达0.=0这段时间内不会发散,然 0的状态x(t),系统将在有限时间t,内到达x=0, 后证明状态xu和y在t>t。时子系统(7)一致渐近 其中t,=-n(52/(52-5gm(x))/传 稳定 考虑到移动机器人运动学模型特性,将有限时 1)状态x和y在t≤t。内的有界性. 间控制技术应用于移动机器人的跟踪控制,可按如 将控制律(6)和(8)代入系统(4),得到如下闭