正在加载图片...
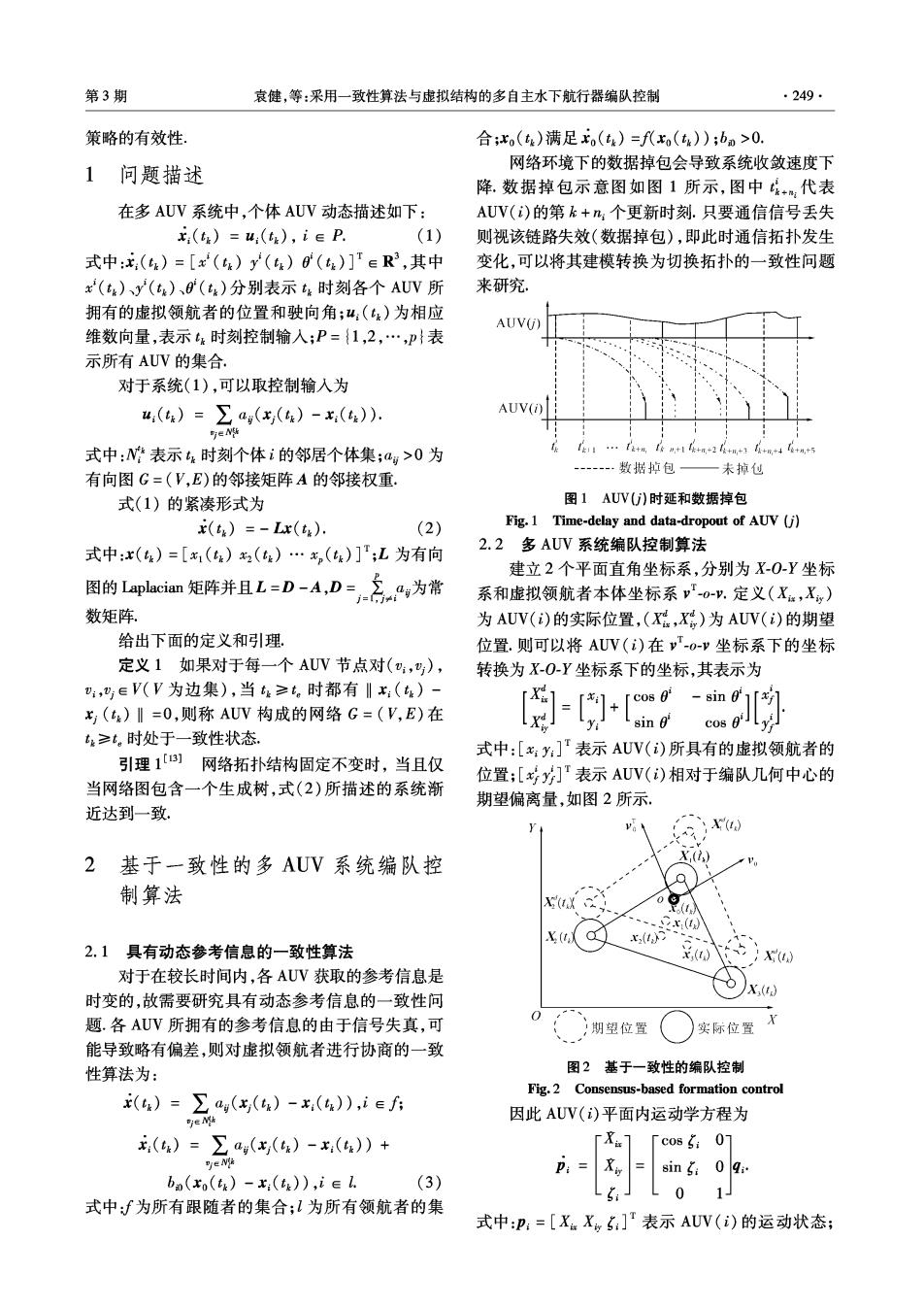
第3期 袁健,等:采用一致性算法与虚拟结构的多自主水下航行器编队控制 ·249· 策略的有效性, 合;xo(t)满足(t)=f(x(tw));bm>0. 1问题描述 网络环境下的数据掉包会导致系统收敛速度下 降,数据掉包示意图如图1所示,图中+代表 在多AUV系统中,个体AUV动态描述如下: AUV(i)的第k+n个更新时刻.只要通信信号丢失 x:(t)=u:(tk),i∈P. (1) 则视该链路失效(数据掉包),即此时通信拓扑发生 式中::(k)=[x(k)y()0()]T∈R3,其中 变化,可以将其建模转换为切换拓扑的一致性问题 x(tw)y(t)、0(t)分别表示时刻各个AUV所 来研究 拥有的虚拟领航者的位置和驶向角;:(k)为相应 AUVU) 维数向量,表示,时刻控制输人;P={1,2,…,p}表 示所有AUV的集合 对于系统(1),可以取控制输入为 u:()=∑ag(x,()-x(). AUV() 防e啡 式中:W表示,时刻个体i的邻居个体集;ag>0为 1…t++1++2+n+++4++ …数据掉包—未掠包 有向图G=(V,E)的邻接矩阵A的邻接权重。 式(1)的紧凑形式为 图1AUV()时延和数据掉包 (t)=-Lx(t). (2) Fig.1 Time-delay and data-dropout of AUV(j) 式中:x()=[x()x2()…x,()];L为有向 2.2多AUV系统编队控制算法 建立2个平面直角坐标系,分别为X-0-Y坐标 图的pd矩阵并且L=D-A,D=,名A,为常 系和虚拟领航者本体坐标系v-o-以.定义(X*,Xr) 数矩阵 为AUV(i)的实际位置,(X,X)为AUV(i)的期望 给出下面的定义和引理。 位置.则可以将AUV()在-o-v坐标系下的坐标 定义1如果对于每一个AU节点对(:,), 转换为X-0-Y坐标系下的坐标,其表示为 :,四∈V(V为边集),当≥t。时都有‖x:(4)- 七,(t)‖=0,则称AUV构成的网络G=(V,E)在 t≥t。时处于一致性状态 式中:[x:y:]T表示AUV()所具有的虚拟领航者的 引理1]网络拓扑结构固定不变时,当且仅 位置;[矿力表示AUV()相对于编队几何中心的 当网络图包含一个生成树,式(2)所描述的系统渐 期望偏离量,如图2所示。 近达到一致. ,X() 2 基于一致性的多AUV系统编队控 制算法 x(2 X( x( 2.1具有动态参考信息的一致性算法 及因 X( 对于在较长时间内,各AUV获取的参考信息是 X(t 时变的,故需要研究具有动态参考信息的一致性问 题.各AUV所拥有的参考信息的由于信号失真,可 !期望位置 实际位置 F 能导致略有偏差,则对虚拟领航者进行协商的一致 性算法为: 图2基于一致性的编队控制 Fig.2 Consensus-based formation control ()=∑ag(()-(4),ief月 因此AUV()平面内运动学方程为 ()=∑ag(x()-x()+ 「cosg:07 sin:0 ba(xo(t)-x;(t)),iL. (3) 1 式中:∫为所有跟随者的集合;1为所有领航者的集 式中:P:=[XX:]T表示AUV(i)的运动状态;