正在加载图片...
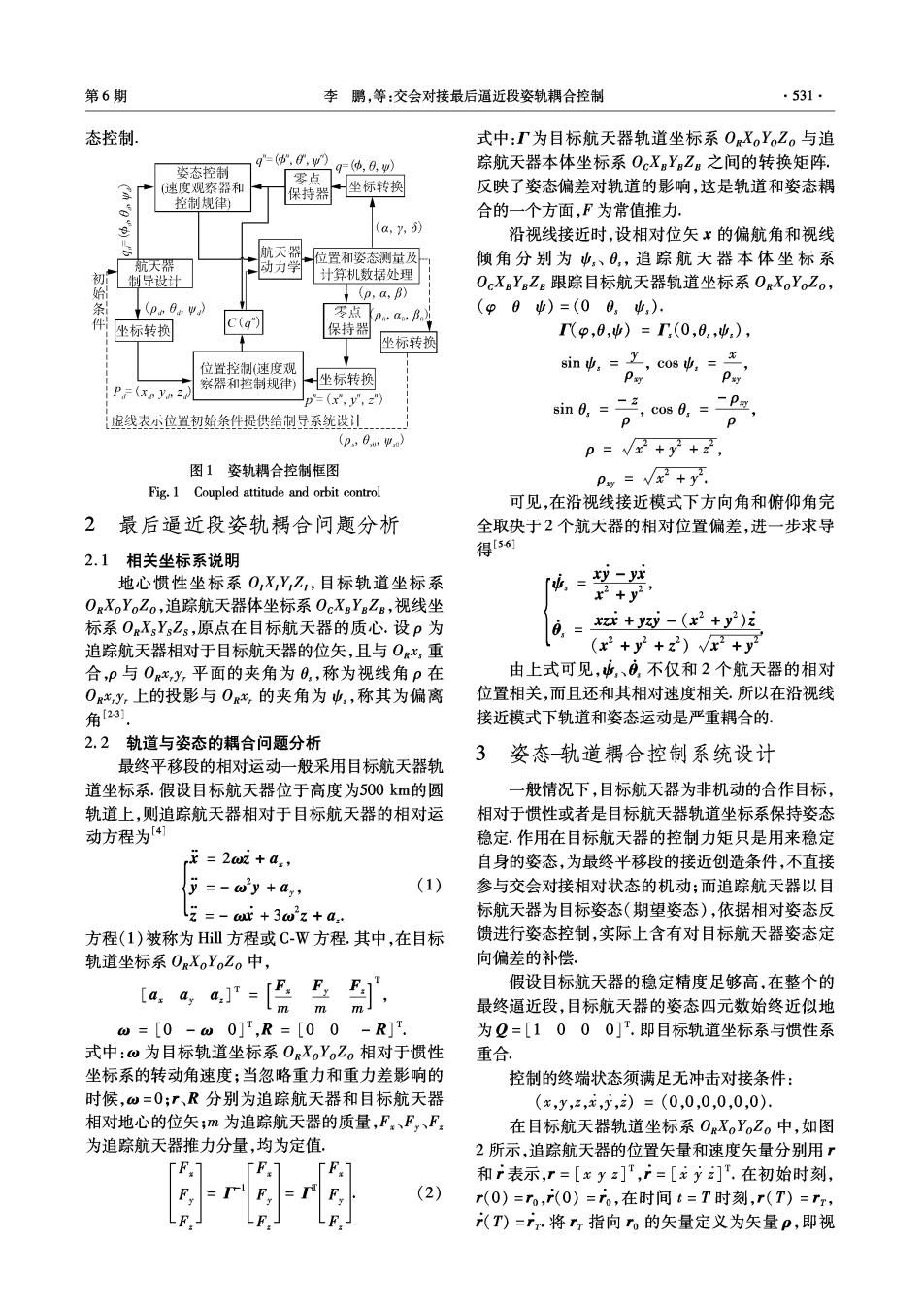
第6期 李鹏,等:交会对接最后逼近段姿轨耦合控制 ·531· 态控制. 式中:T为目标航天器轨道坐标系O®YoYoZ。与追 g(,,w) 姿态控制 q=(,8,9) 踪航天器本体坐标系OcX:YgZB之间的转换矩阵. 零点 (速度观察器和 保持器 坐标转换 反映了姿态偏差对轨道的影响,这是轨道和姿态耦 控制规律) 合的一个方面,F为常值推力. (a,y,) 沿视线接近时,设相对位矢x的偏航角和视线 航天器 航大器 位置和姿态测量及 倾角分别为中、0,追踪航天器本体坐标系 初 动力学 制导设计 计算机数据处理 OCXEYEZE跟踪目标航天器轨道坐标系ORX,YoZo, 始 (p,a,B) 条 (pnB9) (p0中)=(00,中,) 件 零点pa,B 坐标转换 c(q) 保持器 T(p,0,)=T(0,0,中), 坐标转换 位置控制(速度观 察器和控制规律, 坐标转换 sin,=,co0s女,=起】 Pw P灯 PF(Xp Vn Z p(x,y,z) 虚线表示位誉初始条件提供给制导系统设计 sin0。=。,co88,=Pg p (p,日,wu】 p=V√R+y2+2, 图1姿轨耦合控制框图 pw=√e2+y Fig.1 Coupled attitude and orbit control 可见,在沿视线接近模式下方向角和俯仰角完 2最后逼近段姿轨耦合问题分析 全取决于2个航天器的相对位置偏差,进一步求导 得56例 2.1相关坐标系说明 地心惯性坐标系O,X,Y,Z,目标轨道坐标系 「或,=y-yE OgXoYoZo,追踪航天器体坐标系OcXgYgZE,视线坐 x2+y2 标系ORXsYsZs,原点在目标航天器的质心.设p为 6=+-(2+)2 追踪航天器相对于目标航天器的位矢,且与Ox,重 (x2+y2+z2)We2+y 合,p与Ox,y,平面的夹角为0,称为视线角p在 由上式可见,中,、0,不仅和2个航天器的相对 Oxy,上的投影与Ox,的夹角为山,称其为偏离 位置相关,而且还和其相对速度相关,所以在沿视线 角23) 接近模式下轨道和姿态运动是严重耦合的, 2.2轨道与姿态的耦合问题分析 3姿态-轨道耦合控制系统设计 最终平移段的相对运动一般采用目标航天器轨 道坐标系.假设目标航天器位于高度为500km的圆 一般情况下,目标航天器为非机动的合作目标, 轨道上,则追踪航天器相对于目标航天器的相对运 相对于惯性或者是目标航天器轨道坐标系保持姿态 动方程为[4 稳定.作用在目标航天器的控制力矩只是用来稳定 x=2w2+a., 自身的姿态,为最终平移段的接近创造条件,不直接 5=-wy+a, (1) 参与交会对接相对状态的机动;而追踪航天器以目 z=-a城+3w2z+a 标航天器为目标姿态(期望姿态),依据相对姿态反 方程(1)被称为H山方程或C-W方程.其中,在目标 馈进行姿态控制,实际上含有对目标航天器姿态定 轨道坐标系OgXoYoZ。中, 向偏差的补偿. La,a,a.]=F 假设目标航天器的稳定精度足够高,在整个的 mmm 最终逼近段,目标航天器的姿态四元数始终近似地 w=[0-w0]T,R=[00-R]T 为2=[1000]T.即目标轨道坐标系与惯性系 式中:ω为目标轨道坐标系O.X。YoZ。相对于惯性 重合 坐标系的转动角速度;当忽略重力和重力差影响的 控制的终端状态须满足无冲击对接条件: 时候,w=0;r、R分别为追踪航天器和目标航天器 (x,y,z,x,y,2)=(0,0,0,0,0,0) 相对地心的位矢;m为追踪航天器的质量,F.、F,、F: 在目标航天器轨道坐标系OgXoYoZ。中,如图 为追踪航天器推力分量,均为定值, 2所示,追踪航天器的位置矢量和速度矢量分别用? C F a 和户表示,r=[xyz],r=[y].在初始时刻, (2) r(0)=ro,(0)=i%,在时间t=T时刻,r(T)=Tr, r(T)=r,将r,指向r。的矢量定义为矢量p,即视