正在加载图片...
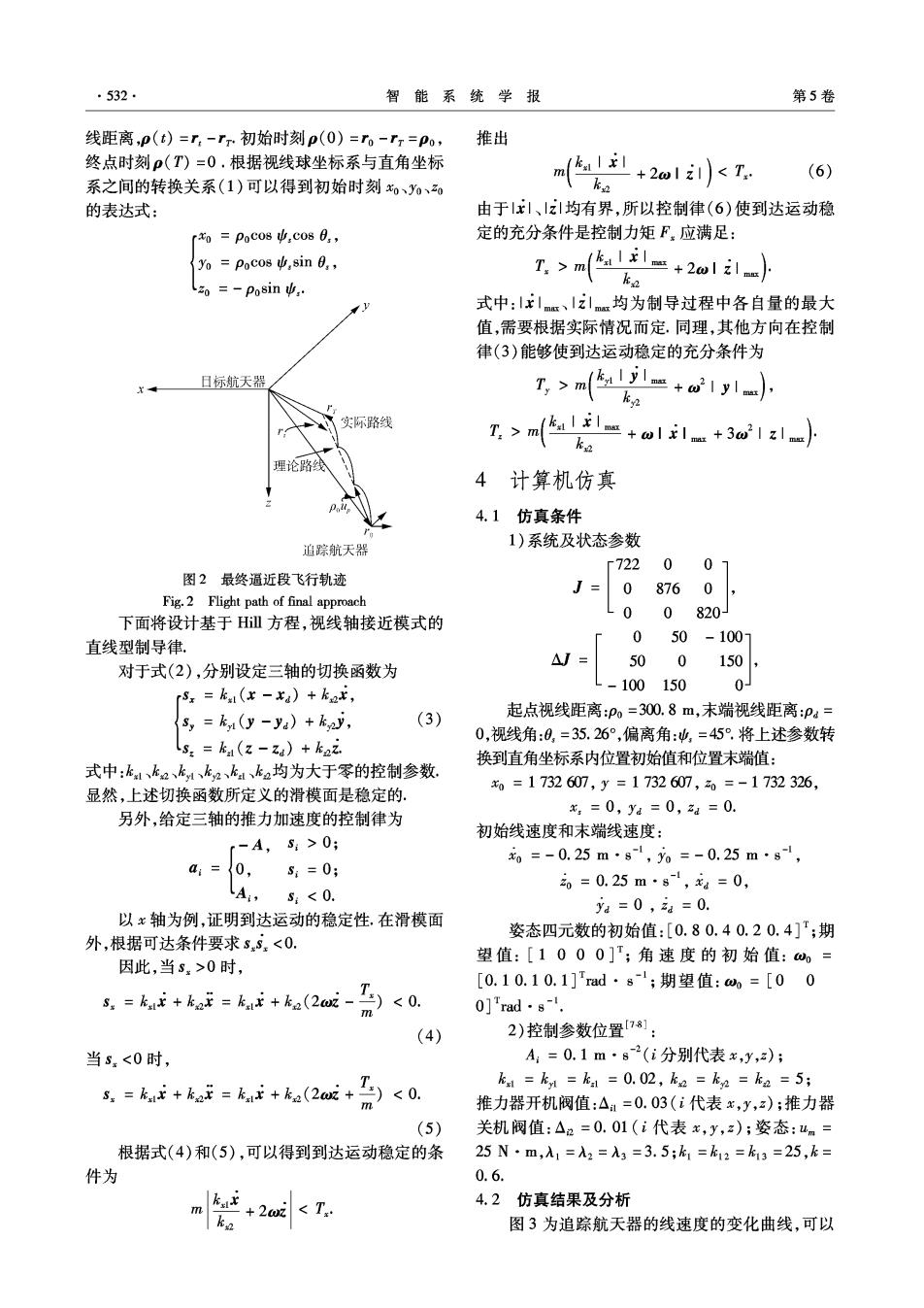
·532. 智能系统学报 第5卷 线距离,p(t)=r,-rr初始时刻p(O)=r。-rr=po, 推出 终点时刻p(T)=0,根据视线球坐标系与直角坐标 +a1元 (6) 系之间的转换关系(1)可以得到初始时刻、y%、0 的表达式: 由于1、z均有界,所以控制律(6)使到达运动稳 r0=PoC084.C0s8, 定的充分条件是控制力矩F应满足: yo=Pocos中,sin9, T.>mal=+2a121m} zo=-po8in也,. 式中:x|mr、Ia均为制导过程中各自量的最大 值,需要根据实际情况而定,同理,其他方向在控制 律(3)能够使到达运动稳定的充分条件为 日标航天器 T,>m kalylas lylm 实际路线 T.ma301 理论路线 4计算机仿真 4.1仿真条件 1)系统及状态参数 追踪航天器 r722 0 07 图2最终逼近段飞行轨迹 J= 0 8760, Fig.2 Flight path of final approach L O 0820 下面将设计基于H方程,视线轴接近模式的 0 直线型制导律. 50-1007 50 0 150 对于式(2),分别设定三轴的切换函数为 rSx=k(x-xa)+ka£, -100150 0- sy =kn(y -ya)+kny, (3) 起点视线距离:po=300.8m,末端视线距离:pa= 0,视线角:0,-35.26°,偏离角:4,=45°.将上述参数转 lsx=ku(z-zu)+k2乙 换到直角坐标系内位置初始值和位置末端值: 式中:k1k2、k1、k,2kka均为大于零的控制参数 x0=1732607,y=1732607,6=-1732326, 显然,上述切换函数所定义的滑模面是稳定的. x,=0,ya=0,2a=0. 另外,给定三轴的推力加速度的控制律为 初始线速度和末端线速度: r-A,5:>0; 0=-0.25m·81,y%=-0.25m·8, a={0, S:=0; 6=0.25m·81,4=0, 5:<0. ya=0,2a=0. 以x轴为例,证明到达运动的稳定性.在滑模面 姿态四元数的初始值:[0.80.40.20.4]';期 外,根据可达条件要求sS<0. 因此,当3.>0时, 望值:[1000]';角速度的初始值:,= [0.10.10.1]'rad·s;期望值:=[00 &.=kae+ka主=ka正+ka(2ai-乙)<0. 0]Trad·s-l. (4) 2)控制参数位置781: 当s.<0时, A:=0.1m·s2(i分别代表x,y,z); 5.=k+khg(2oi0. k1=k1=k1=0.02,k2=k2=k2=5; m 推力器开机阀值:△1=0.03(i代表x,y,);推力器 (5) 关机阀值:△2=0.01(i代表x,y,z);姿态:um= 根据式(4)和(5),可以得到到达运动稳定的条 25N·m,入1=2=A3=3.5;k1=k12=k13=25,k= 件为 0.6. 4.2仿真结果及分析 m ,+20z T 图3为追踪航天器的线速度的变化曲线,可以