正在加载图片...
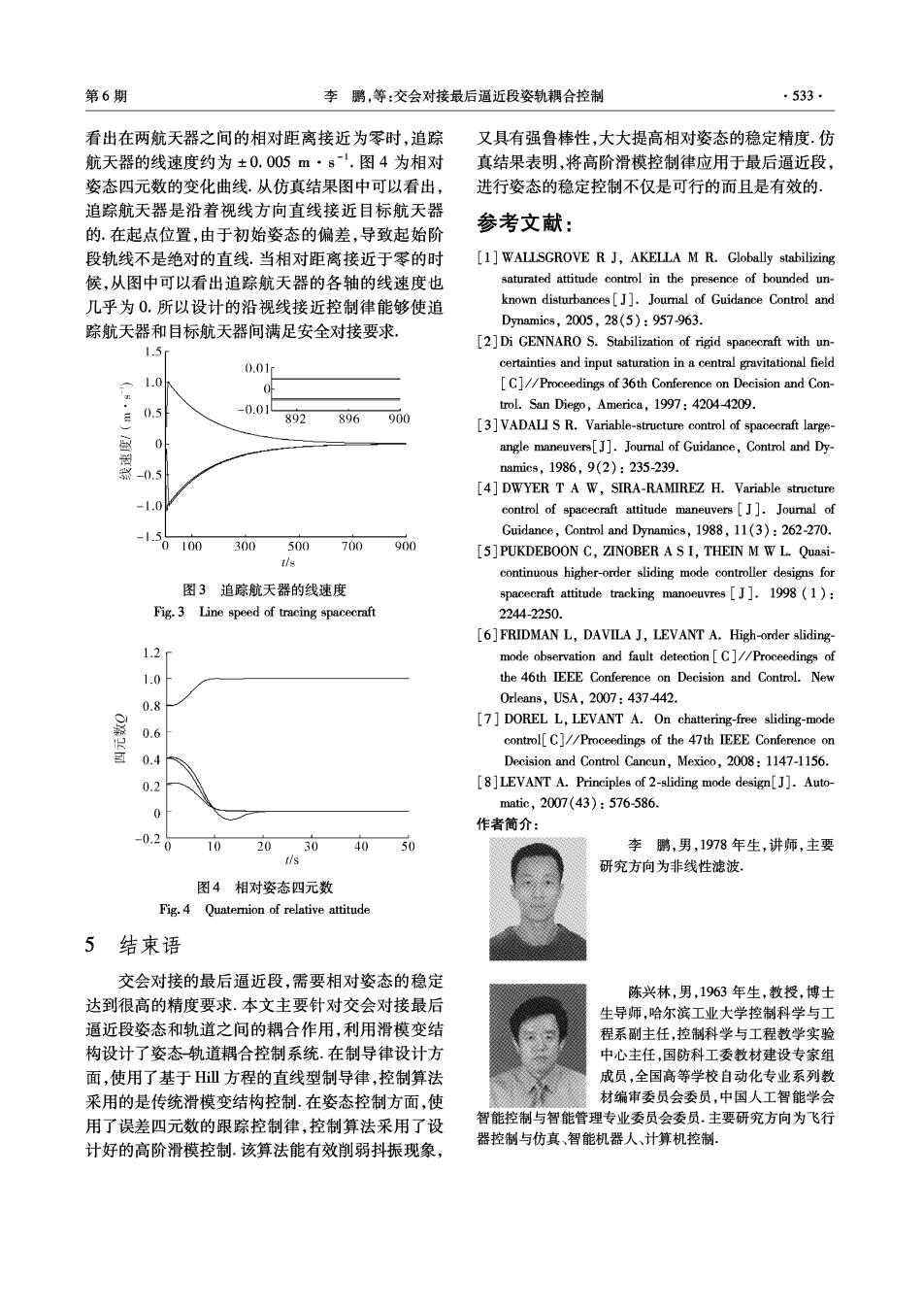
第6期 李鹏,等:交会对接最后逼近段姿轨耦合控制 ·533 看出在两航天器之间的相对距离接近为零时,追踪 又具有强鲁棒性,大大提高相对姿态的稳定精度.仿 航天器的线速度约为±0.005m·s.图4为相对 真结果表明,将高阶滑模控制律应用于最后逼近段, 姿态四元数的变化曲线.从仿真结果图中可以看出, 进行姿态的稳定控制不仅是可行的而且是有效的 追踪航天器是沿着视线方向直线接近目标航天器 的.在起点位置,由于初始姿态的偏差,导致起始阶 参考文献: 段轨线不是绝对的直线,当相对距离接近于零的时 [1]WALLSGROVE R J,AKELLA M R.Globally stabilizing 候,从图中可以看出追踪航天器的各轴的线速度也 saturated attitude control in the presence of bounded un- 几乎为O.所以设计的沿视线接近控制律能够使追 known disturbances [J].Journal of Guidance Control and 踪航天器和目标航天器间满足安全对接要求。 Dynamics,2005,28(5):957-963. [2]Di GENNARO S.Stabilization of rigid spacecraft with un- 1.5 0.01 certainties and input saturation in a central gravitational field 1.0 0 [C]//Proceedings of 36th Conference on Decision and Con- 0.5 -0.019 trol.San Diego,America,1997:4204-4209. 892 896 900 [3]VADALI S R.Variable-structure control of spacecraft large- angle maneuvers[J].Joural of Guidance,Control and Dy- -0.5 namics,1986,9(2):235-239. [4]DWYER T A W,SIRA-RAMIREZ H.Variable structure -1.0 control of spacecraft attitude maneuvers [J].Joumal of -1.5 Guidance,Control and Dynamics,1988.11(3):262-270. 0100 300500 700 900 [5]PUKDEBOON C,ZINOBER A S I,THEIN M W L.Quasi- tls continuous higher-order sliding mode controller designs for 图3追踪航天器的线速度 spacecraft attitude tracking manoeuvres J].1998(1): Fig.3 Line speed of tracing spacecraft 2244-2250. [6]FRIDMAN L,DAVILA J,LEVANT A.High-order sliding- 1.2 mode observation and fault detection C]//Proceedings of 1.0 the 46th IEEE Conference on Decision and Control.New 0.8 0lean8,USA,2007:437442. [7]DOREL L,LEVANT A.On chattering-free sliding-mode 0.6 control[C]//Proceedings of the 47th IEEE Conference on 0.4 Decision and Control Cancun,Mexico,2008:1147-1156. 0.2 [8]LEVANT A.Principles of 2-sliding mode design[J].Auto- matic,2007(43):576586. 作者简介: 0.20 10 20 30 40 50 李鹏,男,1978年生,讲师,主要 tis 研究方向为非线性滤波: 图4相对姿态四元数 Fig.4 Quaternion of relative attitude 5结束语 交会对接的最后逼近段,需要相对姿态的稳定 陈兴林,男,1963年生,教授,博士 达到很高的精度要求.本文主要针对交会对接最后 生导师,哈尔滨工业大学控制科学与工 逼近段姿态和轨道之间的耦合作用,利用滑模变结 程系副主任,控制科学与工程教学实验 构设计了姿态轨道耦合控制系统.在制导律设计方 中心主任,国防科工委教材建设专家组 面,使用了基于H方程的直线型制导律,控制算法 成员,全国高等学校自动化专业系列教 采用的是传统滑模变结构控制.在姿态控制方面,使 材编审委员会委员,中国人工智能学会 用了误差四元数的跟踪控制律,控制算法采用了设 智能控制与智能管理专业委员会委员.主要研究方向为飞行 器控制与仿真、智能机器人、计算机控制 计好的高阶滑模控制.该算法能有效削弱抖振现象