正在加载图片...
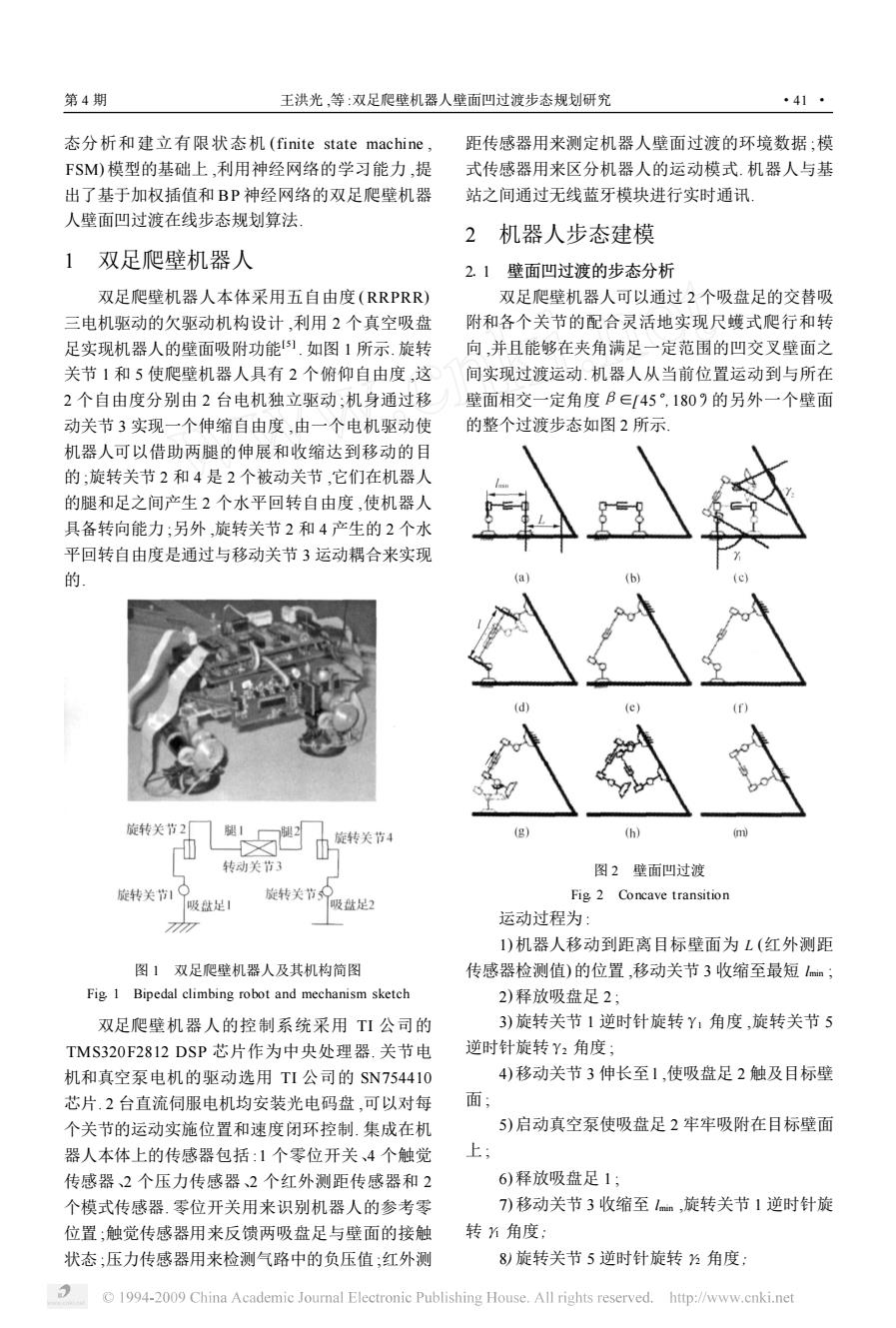
第4期 王洪光,等:双足爬壁机器人壁面凹过渡步态规划研究 ·41· 态分析和建立有限状态机(finite state machine, 距传感器用来测定机器人壁面过渡的环境数据;模 FSM)模型的基础上,利用神经网络的学习能力,提 式传感器用来区分机器人的运动模式.机器人与基 出了基于加权插值和BP神经网络的双足爬壁机器 站之间通过无线蓝牙模块进行实时通讯。 人壁面凹过渡在线步态规划算法 2机器人步态建模 1双足爬壁机器人 2.1壁面凹过渡的步态分析 双足爬壁机器人本体采用五自由度(RRPRR) 双足爬壁机器人可以通过2个吸盘足的交替吸 三电机驱动的欠驱动机构设计,利用2个真空吸盘 附和各个关节的配合灵活地实现尺蠖式爬行和转 足实现机器人的壁面吸附功能).如图1所示.旋转 向,并且能够在夹角满足一定范围的凹交叉壁面之 关节1和5使爬壁机器人具有2个俯仰自由度,这间实现过渡运动,机器人从当前位置运动到与所在 2个自由度分别由2台电机独立驱动;机身通过移壁面相交一定角度B∈45°,1809的另外一个壁面 动关节3实现一个伸缩自由度,由一个电机驱动使 的整个过渡步态如图2所示。 机器人可以借助两腿的伸展和收缩达到移动的目 的;旋转关节2和4是2个被动关节,它们在机器人 的腿和足之间产生2个水平回转自由度,使机器人 具备转向能力:另外,旋转关节2和4产生的2个水 平回转自由度是通过与移动关节3运动耦合来实现 的 (b (d) fe (f) 旋转关节2 旋转关节4 (g) (h) m 转动关节3 图2壁面凹过渡 旋转关节1 旋转关节 Fig 2 Concave transition 吸然足 吸欧足2 7 运动过程为: 1)机器人移动到距离目标壁面为L(红外测距 图1双足爬壁机器人及其机构简图 传感器检测值)的位置,移动关节3收缩至最短; Fig 1 Bipedal climbing robot and mechanism sketch 2)释放吸盘足2; 双足爬壁机器人的控制系统采用TI公司的 3)旋转关节1逆时针旋转Y1角度,旋转关节5 TMS320F2812DSP芯片作为中央处理器.关节电 逆时针旋转Y2角度 机和真空泵电机的驱动选用TI公司的SN754410 4)移动关节3伸长至1,使吸盘足2触及目标壁 芯片.2台直流伺服电机均安装光电码盘,可以对每 面; 个关节的运动实施位置和速度闭环控制.集成在机 5)启动真空泵使吸盘足2牢牢吸附在目标壁面 器人本体上的传感器包括:1个零位开关、4个触觉 上 传感器、2个压力传感器、2个红外测距传感器和2 6)释放吸盘足1; 个模式传感器.零位开关用来识别机器人的参考零 7)移动关节3收缩至1m,旋转关节1逆时针旋 位置:触觉传感器用来反馈两吸盘足与壁面的接触 转1角度: 状态;压力传感器用来检测气路中的负压值;红外测 8)旋转关节5逆时针旋转角度: 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net态分析和建立有限状态机 (finite state machine , FSM) 模型的基础上 ,利用神经网络的学习能力 ,提 出了基于加权插值和 BP 神经网络的双足爬壁机器 人壁面凹过渡在线步态规划算法. 1 双足爬壁机器人 双足爬壁机器人本体采用五自由度 ( RRPRR) 三电机驱动的欠驱动机构设计 ,利用 2 个真空吸盘 足实现机器人的壁面吸附功能[5 ] . 如图 1 所示. 旋转 关节 1 和 5 使爬壁机器人具有 2 个俯仰自由度 ,这 2 个自由度分别由 2 台电机独立驱动 ;机身通过移 动关节 3 实现一个伸缩自由度 ,由一个电机驱动使 机器人可以借助两腿的伸展和收缩达到移动的目 的 ;旋转关节 2 和 4 是 2 个被动关节 ,它们在机器人 的腿和足之间产生 2 个水平回转自由度 ,使机器人 具备转向能力 ;另外 ,旋转关节 2 和 4 产生的 2 个水 平回转自由度是通过与移动关节 3 运动耦合来实现 的. 图 1 双足爬壁机器人及其机构简图 Fig11 Bipedal climbing robot and mechanism sketch 双足爬壁机器人的控制系统采用 TI 公司的 TMS320F2812 DSP 芯片作为中央处理器. 关节电 机和真空泵电机的驱动选用 TI 公司的 SN754410 芯片. 2 台直流伺服电机均安装光电码盘 ,可以对每 个关节的运动实施位置和速度闭环控制. 集成在机 器人本体上的传感器包括 :1 个零位开关、4 个触觉 传感器、2 个压力传感器、2 个红外测距传感器和 2 个模式传感器. 零位开关用来识别机器人的参考零 位置 ;触觉传感器用来反馈两吸盘足与壁面的接触 状态 ;压力传感器用来检测气路中的负压值 ;红外测 距传感器用来测定机器人壁面过渡的环境数据 ;模 式传感器用来区分机器人的运动模式. 机器人与基 站之间通过无线蓝牙模块进行实时通讯. 2 机器人步态建模 211 壁面凹过渡的步态分析 双足爬壁机器人可以通过 2 个吸盘足的交替吸 附和各个关节的配合灵活地实现尺蠖式爬行和转 向 ,并且能够在夹角满足一定范围的凹交叉壁面之 间实现过渡运动. 机器人从当前位置运动到与所在 壁面相交一定角度β∈[ 45°, 180°) 的另外一个壁面 的整个过渡步态如图 2 所示. 图 2 壁面凹过渡 Fig12 Concave transition 运动过程为 : 1) 机器人移动到距离目标壁面为 L (红外测距 传感器检测值) 的位置 ,移动关节 3 收缩至最短 lmin ; 2) 释放吸盘足 2 ; 3) 旋转关节 1 逆时针旋转γ1 角度 ,旋转关节 5 逆时针旋转γ2 角度 ; 4) 移动关节 3 伸长至 l ,使吸盘足 2 触及目标壁 面 ; 5) 启动真空泵使吸盘足 2 牢牢吸附在目标壁面 上 ; 6) 释放吸盘足 1 ; 7) 移动关节 3 收缩至 lmin ,旋转关节 1 逆时针旋 转γ1 角度; 8) 旋转关节 5 逆时针旋转γ2 角度; 第 4 期 王洪光 ,等 :双足爬壁机器人壁面凹过渡步态规划研究 ·41 ·