正在加载图片...
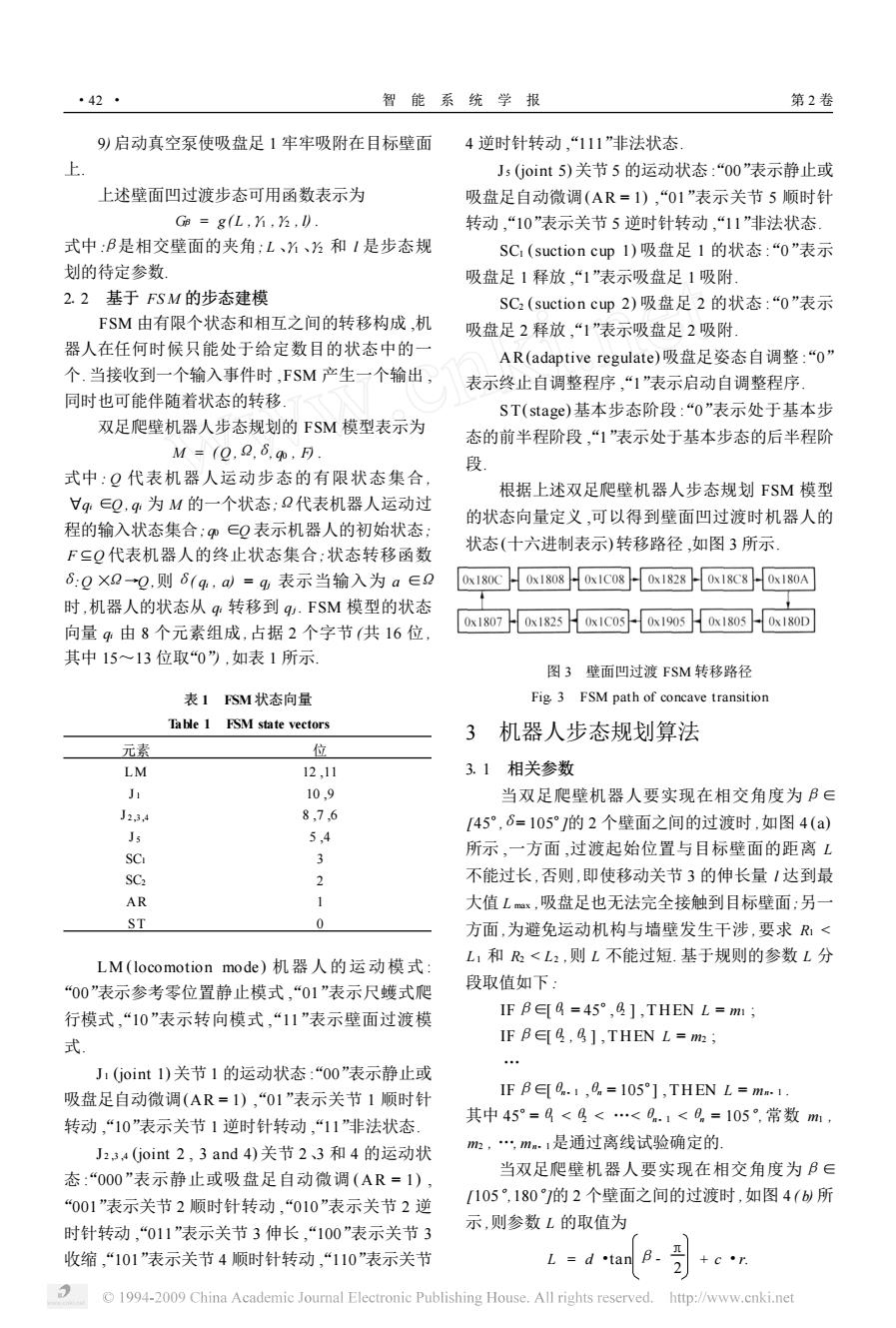
·42 智能系统学报 第2卷 9)启动真空泵使吸盘足1牢牢吸附在目标壁面 4逆时针转动,“111”非法状态, 上 Js(joint5)关节5的运动状态:“o0”表示静止或 上述壁面凹过渡步态可用函数表示为 吸盘足自动微调(AR=1),“01”表示关节5顺时针 G=g(L,,,) 转动,“10”表示关节5逆时针转动,“11”非法状态 式中:B是相交壁面的夹角;L、、?和1是步态规 SC(suction cup1)吸盘足1的状态:“0”表示 划的待定参数 吸盘足1释放,“1”表示吸盘足1吸附 2.2基于FSM的步态建模 SCz(suction cup2)吸盘足2的状态:“0”表示 FSM由有限个状态和相互之间的转移构成,机 吸盘足2释放,“1"”表示吸盘足2吸附 器人在任何时候只能处于给定数目的状态中的一 AR(adaptive regulate)吸盘足姿态自调整:“o” 个.当接收到一个输入事件时,FSM产生一个输出, 表示终止自调整程序,“1”表示启动自调整程序 同时也可能伴随着状态的转移. ST(stage)基本步态阶段:“0”表示处于基本步 双足爬壁机器人步态规划的FSM模型表示为 态的前半程阶段,“1"”表示处于基本步态的后半程阶 M=(Q,2,6,m,日. 段 式中:Q代表机器人运动步态的有限状态集合, 根据上述双足爬壁机器人步态规划FSM模型 廿q∈Q,g,为M的一个状态;2代表机器人运动过 的状态向量定义,可以得到壁面凹过渡时机器人的 程的输入状态集合:∈Q表示机器人的初始状态: F三Q代表机器人的终止状态集合:状态转移函数 状态(十六进制表示)转移路径,如图3所示 6:Q×2-Q,则6(4,a=g表示当输入为a∈2 0180C 0xI808 0x1C08 0x1828 0x18C8 0x180A 时,机器人的状态从g转移到q.FSM模型的状态 0x1807 0x1825 0xIC05 0x1905 01805 0x180D 向量由8个元素组成,占据2个字节(共16位, 其中15~13位取“0”),如表1所示 图3壁面凹过渡FSM转移路径 表1SM状态向量 Fig 3 FSM path of concave transition Table 1 FSM state vectors 3机器人步态规划算法 元素 位 LM 12,11 3.1相关参数 J 10,9 当双足爬壁机器人要实现在相交角度为B∈ J23 8,7,6 [45°,6=105°的2个壁面之间的过渡时,如图4(a) J5 5,4 SC 3 所示,一方面,过渡起始位置与目标壁面的距离L SC 2 不能过长,否则,即使移动关节3的伸长量1达到最 AR 大值Lx,吸盘足也无法完全接触到目标壁面:另一 ST 0 方面,为避免运动机构与墙壁发生干涉,要求R< LM(locomotion mode)机器人的运动模式: L1和R<L2,则L不能过短.基于规则的参数L分 “00”"表示参考零位置静止模式,“01”表示尺蠖式爬 段取值如下: 行模式,“10”表示转向模式,“11”表示壁面过渡模 IFB∈A=45°,g],THEN L=m1; 式 IFB∈A,g],THEN L=m; J1(joint1)关节1的运动状态:“00”表示静止或 吸盘足自动微调(AR=1),“01”表示关节1顺时针 IFB∈0.1,A.=105],THEN L=mm1 转动,“10”表示关节1逆时针转动,“11”非法状态。 其中45°=4<4<…<0n.1<0。=105°,常数m, J234(joint2,3and4)关节2、3和4的运动状 m2,,mm1是通过离线试验确定的 态:“000”表示静止或吸盘足自动微调(AR=1), 当双足爬壁机器人要实现在相交角度为B∈ “001”表示关节2顺时针转动,“010”表示关节2逆 105°,1807的2个壁面之间的过渡时,如图4(b)所 示,则参数L的取值为 时针转动,“011”表示关节3伸长,“100”表示关节3 收缩,“101”表示关节4顺时针转动,“110”表示关节 2 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved. http://www.cnki.net9) 启动真空泵使吸盘足 1 牢牢吸附在目标壁面 上. 上述壁面凹过渡步态可用函数表示为 Gβ = g (L ,γ1 ,γ2 , l) . 式中 :β是相交壁面的夹角; L 、γ1 、γ2 和 l 是步态规 划的待定参数. 212 基于 FS M 的步态建模 FSM 由有限个状态和相互之间的转移构成 ,机 器人在任何时候只能处于给定数目的状态中的一 个. 当接收到一个输入事件时 ,FSM 产生一个输出 , 同时也可能伴随着状态的转移. 双足爬壁机器人步态规划的 FSM 模型表示为 M = ( Q ,Ω,δ, q0 , F) . 式中 : Q 代表机器人运动步态的有限状态集合 , Πqi ∈Q , qi 为 M 的一个状态;Ω代表机器人运动过 程的输入状态集合; q0 ∈Q 表示机器人的初始状态; F ΑQ 代表机器人的终止状态集合;状态转移函数 δ:Q ×Ω→Q ,则δ( qi , a) = qj 表示当输入为 a ∈Ω 时 ,机器人的状态从 qi 转移到 qj . FSM 模型的状态 向量 qi 由 8 个元素组成 ,占据 2 个字节 (共 16 位 , 其中 15~13 位取“0”) ,如表 1 所示. 表 1 FSM 状态向量 Table 1 FSM state vectors 元素 位 LM 12 ,11 J 1 10 ,9 J 2 ,3 ,4 8 ,7 ,6 J 5 5 ,4 SC1 3 SC2 2 AR 1 ST 0 LM (locomotion mode ) 机器人的运动模式 : “00”表示参考零位置静止模式“, 01”表示尺蠖式爬 行模式“, 10”表示转向模式 “, 11”表示壁面过渡模 式. J 1 (joint 1) 关节 1 的运动状态“: 00”表示静止或 吸盘足自动微调(AR = 1) “, 01”表示关节 1 顺时针 转动“, 10”表示关节 1 逆时针转动“, 11”非法状态. J 2 ,3 ,4 (joint 2 , 3 and 4) 关节 2、3 和 4 的运动状 态“: 000”表示静止或吸盘足自动微调 ( AR = 1) , “001”表示关节 2 顺时针转动“, 010”表示关节 2 逆 时针转动“, 011”表示关节 3 伸长“, 100”表示关节 3 收缩“, 101”表示关节 4 顺时针转动“, 110”表示关节 4 逆时针转动“, 111”非法状态. J 5 (joint 5) 关节 5 的运动状态“: 00”表示静止或 吸盘足自动微调(AR = 1) “, 01”表示关节 5 顺时针 转动“, 10”表示关节 5 逆时针转动“, 11”非法状态. SC1 (suction cup 1) 吸盘足 1 的状态 “: 0”表示 吸盘足 1 释放“, 1”表示吸盘足 1 吸附. SC2 (suction cup 2) 吸盘足 2 的状态 “: 0”表示 吸盘足 2 释放“, 1”表示吸盘足 2 吸附. AR(adaptive regulate) 吸盘足姿态自调整“: 0” 表示终止自调整程序“, 1”表示启动自调整程序. ST(stage) 基本步态阶段“: 0”表示处于基本步 态的前半程阶段“, 1”表示处于基本步态的后半程阶 段. 根据上述双足爬壁机器人步态规划 FSM 模型 的状态向量定义 ,可以得到壁面凹过渡时机器人的 状态(十六进制表示) 转移路径 ,如图 3 所示. 图 3 壁面凹过渡 FSM 转移路径 Fig13 FSM path of concave transition 3 机器人步态规划算法 311 相关参数 当双足爬壁机器人要实现在相交角度为β∈ [45°,δ= 105°]的 2 个壁面之间的过渡时 ,如图 4 (a) 所示 ,一方面 ,过渡起始位置与目标壁面的距离 L 不能过长 ,否则 ,即使移动关节 3 的伸长量 l 达到最 大值 L max ,吸盘足也无法完全接触到目标壁面;另一 方面 ,为避免运动机构与墙壁发生干涉 ,要求 R1 < L1 和 R2 < L2 ,则 L 不能过短. 基于规则的参数 L 分 段取值如下 : IFβ∈[θ1 = 45°θ, 2 ] ,T HEN L = m1 ; IFβ∈[θ2 ,θ3 ] , T HEN L = m2 ; … IFβ∈[θn - 1 θ, n = 105°] , T HEN L = mn - 1 . 其中 45°=θ1 <θ2 < …<θn - 1 <θn = 105°, 常数 m1 , m2 , …, mn - 1是通过离线试验确定的. 当双足爬壁机器人要实现在相交角度为β∈ [105°,180°]的 2 个壁面之间的过渡时 ,如图 4 ( b) 所 示 ,则参数 L 的取值为 L = d ·tan β- π 2 + c ·r. ·42 · 智 能 系 统 学 报 第 2 卷