正在加载图片...
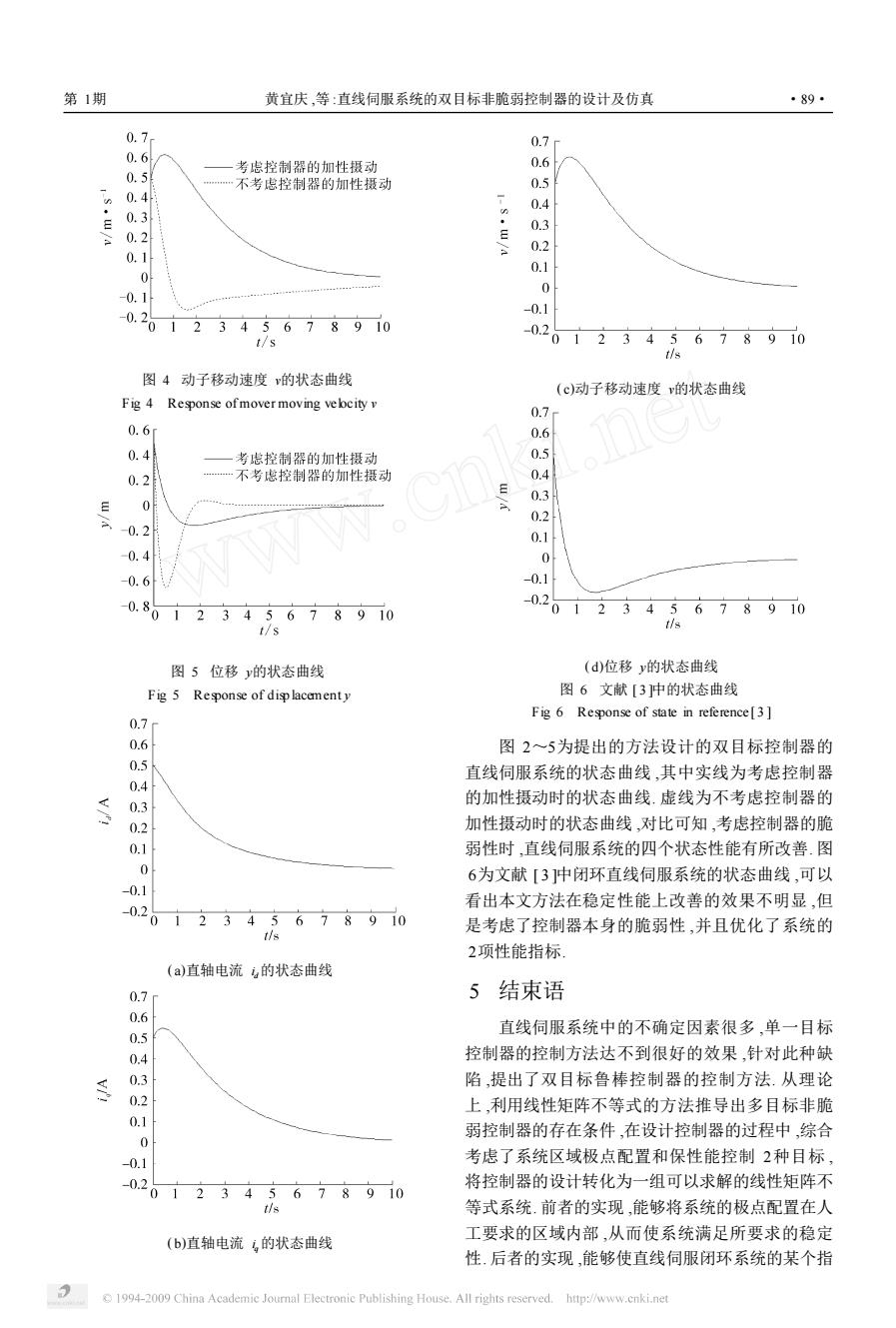
第1期 黄宜庆,等:直线伺服系统的双目标非脆弱控制器的设计及仿真 89 0.7 0.7 0.6 考虑控制器的加性摄动 0.6 0.5 …不考虑控制器的加性摄动 0.5 0.4 0.4 0.3 0.2 s.W/A 0.3 0.2 0.1 0.1 -0.1 0 -0.1 -0.2 01 2345678910 t/s -0.2012345678910 t/s 图4动子移动速度的状态曲线 (c)动子移动速度v的状态曲线 Fig 4 Response ofmover moving vebcity v 0.7 0.6 0.6 0.4 考虑控制器的加性摄动 0.5 0.2 不考虑控制器的加性摄动 0.4 0.3 0 0.2 0.2 0.1 -0.4 0.6 -0.1 0.8 -0.2 12345678910 012345678910 t/s 图5位移y的状态曲线 (d)位移yv的状态曲线 Fig 5 Response of disp lacementy 图6文献[3中的状态曲线 Fig 6 Response of state in reference[3] 0.7r 0.6 图2~5为提出的方法设计的双目标控制器的 0.5 直线伺服系统的状态曲线,其中实线为考虑控制器 0.4 0.3 的加性摄动时的状态曲线,虚线为不考虑控制器的 0.2 加性摄动时的状态曲线,对比可知,考虑控制器的脆 弱性时,直线伺服系统的四个状态性能有所改善.图 0 6为文献【3]中闭环直线伺服系统的状态曲线,可以 -0.1 0.2 看出本文方法在稳定性能上改善的效果不明显,但 012345678910 是考虑了控制器本身的脆弱性,并且优化了系统的 t/s 2项性能指标 (a)直轴电流的状态曲线 0.7 5结束语 0.6 0.5 直线伺服系统中的不确定因素很多,单一目标 0.4 控制器的控制方法达不到很好的效果,针对此种缺 0.3 陷,提出了双目标鲁棒控制器的控制方法.从理论 0.2 上,利用线性矩阵不等式的方法推导出多目标非脆 0.1 弱控制器的存在条件,在设计控制器的过程中,综合 0 -0.1 考虑了系统区域极点配置和保性能控制2种目标, 0.201 将控制器的设计转化为一组可以求解的线性矩阵不 2345678910 t/s 等式系统.前者的实现,能够将系统的极点配置在人 工要求的区域内部,从而使系统满足所要求的稳定 (b)直轴电流的状态曲线 性.后者的实现,能够使直线伺服闭环系统的某个指 1994-2009 China Academie Journal Electronic Publishing House.All rights reserved.http://www.cnki.net图 4 动子移动速度 v的状态曲线 Fig. 4 Response of mover moving velocity v 图 5 位移 y的状态曲线 Fig. 5 Response of disp lacement y ( a)直轴电流 id 的状态曲线 ( b)直轴电流 iq的状态曲线 ( c)动子移动速度 v的状态曲线 ( d)位移 y的状态曲线 图 6 文献 [ 3 ]中的状态曲线 Fig. 6 Response of state in reference[ 3 ] 图 2~5为提出的方法设计的双目标控制器的 直线伺服系统的状态曲线 ,其中实线为考虑控制器 的加性摄动时的状态曲线. 虚线为不考虑控制器的 加性摄动时的状态曲线 ,对比可知 ,考虑控制器的脆 弱性时 ,直线伺服系统的四个状态性能有所改善. 图 6为文献 [ 3 ]中闭环直线伺服系统的状态曲线 ,可以 看出本文方法在稳定性能上改善的效果不明显 ,但 是考虑了控制器本身的脆弱性 ,并且优化了系统的 2项性能指标. 5 结束语 直线伺服系统中的不确定因素很多 ,单一目标 控制器的控制方法达不到很好的效果 ,针对此种缺 陷 ,提出了双目标鲁棒控制器的控制方法. 从理论 上 ,利用线性矩阵不等式的方法推导出多目标非脆 弱控制器的存在条件 ,在设计控制器的过程中 ,综合 考虑了系统区域极点配置和保性能控制 2种目标 , 将控制器的设计转化为一组可以求解的线性矩阵不 等式系统. 前者的实现 ,能够将系统的极点配置在人 工要求的区域内部 ,从而使系统满足所要求的稳定 性. 后者的实现 ,能够使直线伺服闭环系统的某个指 第 1期 黄宜庆 ,等 :直线伺服系统的双目标非脆弱控制器的设计及仿真 ·89·